Главная страница сайта
Российские промышленные издания (узловые агрегаты)
1 ...
16 17 18 [
19 ]
20 превращаемая в механическую работу в цилиндре двигателя, остается постоянной (tj,. = const), то кривая в другом масштабе представляет также среднее индикаторное давление р,.. Среднее давление внутренних сопротивлений с увеличением числа оборотов медленно растет. Скоростной режим холостого хода определяется точкой пересечения кривой р соответствующей заданному положению дроссельной заслонки, и кривой р^, Из фиг. 280,а видно, что характер пересечения этих кривых для карбюраторного двигателя (точка /) соответствует устойчивому режиму.
Действительно, случайное уменьшение числа оборотов вала двигателя приводит к тому, что среднее индикаторное давление p становится больше среднего давления внутренних сопротивлений р^, вследствие чего получается избыточная работа, затрачиваемая на увеличение числа оборотов
Jiff Pi


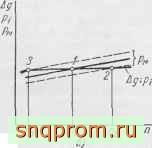
Фиг. 280. Уеловия получения режима холостого хода при малых числах оборотов вала: > а -для карбюраторного двигателя; 6 и в-для двигателя с воспламенением от сжатия.
вала двигателя до тех пор, пока вновь не восстановится баланс работ, т. е, не восстановится первоначальный скоростной режим.
Случайное возрастание числа оборотов приводит к соотношению PPi, указывающему, что на преодоление внутренних сопротивлений двигателя затрачивается больше энергии, чем получается при совершении рабочего процесса; излишек работы совершается за счет кинетической энергии движущихся деталей двигателя. Число оборотов двигателя должно падать до тех пор, пока вновь не восстановится баланс работ и число оборотов не станет равным первоначалыюму.
При изменении внутренних сопротивлений, например, вследствие изменения теплового состояния двигателя, характеристики среднего давления внутренних сопротивлений смещаются (штриховые кривые на фиг. 280, а) и пересекаются с кривой среднего индикаторного давления в точках 2 и 3, близких к точке /. Таким образом, холостой ход карбюраторного двигателя является устойчивым.
В двигателях с воспламенением от сжатия количество топлива, впрыскиваемого на один рабочий цикл, уменьшается до значения, необходимого для преодоления только внутренних сопротивлений двигателя, исключительно из-за уменьше1шя подачи топливного насоса. Количество воздуха, определяемое коэффициентом наполнения, можно считать постоянным (пренебрегая меняющимся с нагрузкой незначительным влиянием подогрева впускаемого воздуха стенками двигателя). Отмеченная выше особенность топливных насосов обычного типа увеличивать подачу топлива на цикл с повышением числа оборотов сохраняется и для малых подач холостого хода (кривая b.g на фиг. 280, 6). При допущении постоянства индикаторного к. п. д. эта кривая представляет также среднее индикаторное давление, но в другом масштабе. При пересечении кривой среднего индикаторного давления и кривой среднего давления внутренних сопротивлений, как видно из фиг. 280, б,
§ 2. РЕГУЛЯТОРЫ
Регулирование двух скоростных режимов можно осуществлять установкой на двигателе двух отдельных регуляторов, из которых один работает при минимальном скоростном режиме, а другой - при максимальном. Однако механизм регулятора получается значительно более компактным, если обе функции выполняются одним и тем же регулирующим агрегатом. Такой регулятор называется д в у х р е ж и м н ы м.
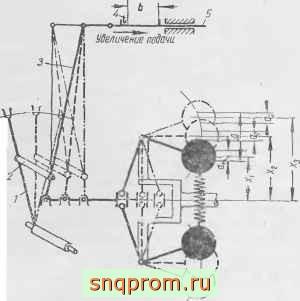
На фиг. 281 изображена схема чувствительного элемента двухрежим-ного регулятора, установленного на конце вала топливного насоса. Осевая втулка 5 регулятора непосредственно насажена на конический конец вала 6. Два груза 3, имеющих симметричные перемещения относительно оси вращения, направляются в своих движениях относительно осевой втулки двумя стержнями 4, ввернутыми в осевую втулку На концы стержней навернуты установочные гайки J, удерживающие наружные тарелки 2 пружин Каждый груз нагружается двумя пружинами Наружная пружина 7 действует непосредственно на груз, а внутренняя 9 - на внутре1шюю тарелку пружин 8. В крайнем внутреннем положении на груз воздействует внешняя пружина; внутренняя тарелка внутренней пружины лежит на буртике стержня так, что усилие последней вызывает только растяжение стержня и на груз не воздействует.
получается крайне малый угол, причем уклон кривой внутренних сопротивлений может быть больше или меньше, чем кривой подачи топлива и среднего индикаторного давления.
Наблюдения над работой транспортных двигателей с воспламенением от сжатия вхолостую показывают, что при постоянном положении рейки топливного насоса чаще наблюдается более быстрое возрастание давления Pi, чем давления р^.
Кривые, соответствующие таким условиям изменения величин р, и р^,. нанесены на фиг. 280, б При этом случайное увеличение числа оборотов приводит к соотношению Р/Р^ и дальнейшему росту числа оборотов, а случайное падение числа оборотов вызывает дальнейшее его уменьшение до полной остановки двигателя вследствие превышения работы сопротивления над работой газов в цилиндре двигателя
Если кривая р^, имеет несколько больший уклон чем кривая р, (фиг. 280,в) режим работы становится устойчивым, хотя устойчивость эта крайне слабо выражена, При небольшом изменении внутренних сопротивлений, выражающемся незначительным смещением кривой вверх или вниз (штриховые кривые на фиг. 280, е), получаются или новые равновесные состояния (точки 2 и 3) при скоростных режимах, значительно отличающихся от первоначального, или полный разгон, или остановка двигателя. Поэтому на транспортных двигателях с воспламенением от сжатия, снабженных топливными насосами обычного типа, необходимо устанавливать регуляторы минимального скоростного режима в отличие от карбюраторных и газовых двигателей, которые в таких регуляторах не нуждаются.
Регулятор минимального числа оборотов холостого хода при уменьшении числа оборотов вала вызывает перемещение регулирующей рейки топливного насоса в сторону увеличения подачи Кривая Ag (и р^) для двигателя с регулятором нанесена на фиг 280, б (кривая е). Ее протекание определяет устойчивый режим холостого хода.
На транспортные двигатели с воспламенением от сжатия необходимо поэтому устанавливать регуляторы, управляющие работой двигателя по крайней мере на двух скоростных режимах - максимальном и минимальном.
Справа на фиг. 281 показана зависимость перемещения грузов от числа оборотов п. Перемещение грузов начинается при числе оборотов п^, когда инерционная сила груза и вращающихся вместе с ним деталей регулятора становится равной усилию предварительной затяжки внешней пружины, С возрастанием числа оборотов равновесие инерционной силы груза и усилия пружины наступает при все увеличивающемся расхождении грузов. При числе оборотов Пч груз дном своей выемки касается внутренней тарелки пружин. Так как внутренняя пружина устанавливается со значительной предварительной затяжкой, дальнейшее перемещение груза возможно лишь после того, как число оборотов возрастает до значения п^, когда инерционная сила груза станет равной сумме силы внешней пружины и силы предварительной затяжки внутренней пружины. Получается интервал изменения числа оборотов щ - Пд, при котором грузы неподвижны.
При п>п^ груз перемеш,ается и сжимает обе пружины до тех пор, пока при л = /?4 не дойдет до ограничителя. Следовательно, двухрежимные регуляторы имеют два участка скорост-
25 20
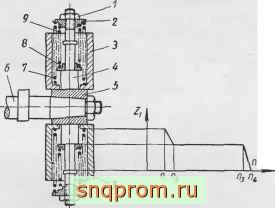
Фиг. 281. Схема грузов двухрежимного регулятора, их перемешекия в аависимости от числа оборотов вала
О
200 500
1500 п об/мин
ных режимов: п- - Пч и - п^, на которых происходит перемещение грузов. Первый из них используется для регулирования минимального скоростного режима, а второй - максимального.
Перемещение грузов передается регулирующей рейке топливного насоса. Расхождению грузов соответствует перемещение рейки в сторону уменьшения подачи.
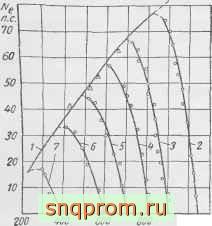
Экспериментальные характеристики двигателя с двухрежимным регулятором изображены на фиг. 282 и 283.
Наличие двухрежимного регулятора не влияет на внешнюю и частичную характеристики двигателя в интервале чисел оборотов Пч - % (фиг.281). В этом интервале скоростным режимом управляет водитель. Действие регулятора при минимальном скоростном режиме вызывает падение мощности и крутящего момента с увеличением числа оборотов. Отсутствие влияния регулятора на этом участке на кривую внешней характеристики объясняется тем, что рейка топливного насоса доведена до особого упора, который препятствует схождению грузов при уменьшении числа оборотов. На максимальном регулируемом скоростном режиме действие регулятора вызывает быстрое падение мощности и среднего эффективного давления до нуля.
Фиг. 282. Характеристики крутящего момента двигателя с воспламенением от сжатия при двухрежимном регуляторе:
/- внешняя характеристика; 2-4 - частичные характеристики.
Из фиг. 282 и 283 видно, что действие регулятора придает режиму работы двигателя высокую устойчивость.
Высокую устойчивость режима работы во всем диапазоне изменения числа оборотов дает так называемый всережимный регулятор, обеспечивающий поддержание всех скоростных режимов двигателя.
Во всережимных механических регуляторах (фиг. 284) муфта 8 регулятора находится под воздействием инерционных сил грузов 5 и усилия пружины 3. При установившемся режиме силы, воздействующие на муфту, взаимно уравновешиваются. При неизменном положении рычага 9 с повы-
л. с 50
zoo 500
Уменьшение подачи

Кдодителю
Фиг. 284. Схема всережимного регулятора.
1000
1500 нотн
Фиг. 283. Характеристики мощности двигателя с воспламенением от сжатия при двухре-жимном регуляторе:
/ - внешняя характеристика; 2-4 - частичные характеристики!
шением числа оборотов увеличивается инерционная сила грузов, что вызывает смещение муфты влево, передающееся рейке 7 топливного насоса при помощи рычага 4. Изменение натяжения пружины 5 приводит к тому, что равновесное положение муфты получается при другом числе оборотов. Натяжение пружины меняется водителем при помощи рычага управления / и рычага 9.
Максимальный и минимальный скоростные режимы двигателя определяются максимальным и минимальным натяжениями пружины, которые соответствуют крайним положениям рычага управления I. Перемещение рычага ограничивается двумя упорами: максимального 2 и минимального 10 натяжения пружины. Для остановки двигателя служит рычаг 6, переставляемый водителем особой тягой.
Управление работой двигателя со всережимным регулятором осуществляется установкой рычага управления в то или иное положение. Вследствие этого частичные характеристики двигателя в этом случае определяются условием постоянного положения этого рычага и каждому положению рычага соответствует своя частичная характеристика. Так как грузы регулятора переходят с одного крайнего положения, соответствующего максимальной подаче топливного насоса, в другое, при котором подача насоса полностью выключена, то каждая частичная характеристика должна соответствовать пределам изменения числа оборотов вала двигателя, соответствующим степени неравномерности регулятора при данной затяжке прух<ины. На фиг. 285 и 286 изображены внешние характеристики крутящего момента и эффектив-
ной мощности двигателя со всережимным регулятором и ряд частичных характеристик, соответствующих различным затяжкам пружины.
Высокая устойчивость режима работы транспортного двигателя на частичных характеристиках при установке на нем всережимного регуля-

1000п об/мсн.
Фиг. 285. Характеристики крутящего момента двигателя со всгрежимным регулятором:
1 - внешняя характеристика; 2-7-частичные характеристики
1000П об/мин.
Фиг. 286. .Характеристики мощности двигателя со всережимным регулятором*
1 - внешняя характеристика; 2-7 - частичные характеристики
тора является существенным преимуществом последнего. Однако применение механических всережимных регуляторов ограничивается тем, что работа при переменном скоростном режиме неблагоприятно влияет на их показатели.
С уменьшением числа оборотов коленчатого вала быстро возрастают как степень неравномерности, так и степень нечувствительности .
Зависимость степени неравномерности всережимного регулятора от числа оборотов вала можно легко найти для упрощенной схемы в предположении, что передаточное отношение механизма от места приложения усилия пружин к центру тяжести грузов постоянно, изменение конфигурации механизма при перемещении груза не меняет его приведенную массу, а пружина имеет постоянную жесткость. В этом случае как усилие пружины, так и инерционная сила, приведенные к тому же подвижному элементу механизма регулятора (его муфте или центру тяжести груза), изображаются при постоянном числе оборотов прямолинейной зависимостью от перемещения груза.
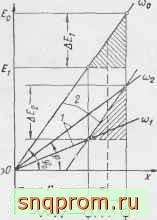
На фиг. 287 показан график зависимости инерционной силы одного груза (линии /) и
усилия пружины (линии 2), приведенного к центру тяжести этого груза от расстояния центра тяжести груза от оси вращения регулятора. При соблюдении указанных упрощающих условий обе зависимости прямолинейны. Инерционная сила
Pj - тшл:,
25 Орлин и др. 2146
Фиг. 287. График соотношений инерционной силы груза и усилия пружины.
или
в = тш
Если обозначить полное перемещение груза (разгон груза) через А и среднее расстояние разгона от оси вращения через г, то приращение усилия пружины АЕ при перемещении груза из одного крайнего положения в другое может быть, с одной стороны, выражено через жесткость пружины
а с другой, если рассматривать условия равновесия груза в двух его крайних положениях, через
АЕ = т(г + ш2 -m ( - 4) i*
где iDi и ID2-угловые скорости, соответствующие крайнему внутреннему и внешнему положениям груза. После приравнивания выражений для АЕ и сокращения на m получаем
Предельные значения угловой скорости (Oj и для заданной затяжки пружины можно выразить через среднее значение угловой скорости
И степень неравномерности регулятора
которые дают связи
= а),р (1 + 4 )
где т - приведенные к центру тяжести груза масса груза и масса части механизма регулятора, относящейся к одному грузу, и называемые в дальнейшем для сокращения массой груза ; CD - угловая скорость вращения вала регулятора; X - расстояние центра тяжести груза от оси вращения вала регулятора. Это уравнение изображается прямой линией, проходящей через начало координат. Уклон этой линии определяет скорость вращения вала регулятора, так как
\g Л -= ГГШ) и О) = 1/ - .
Линия энергии регулятора Е, равной усилию пружины, в зависимости 01 ее затяжки может смещаться по вертикали, не изменяя своего уклона (линии 2, фиг. 287). При некоторой затяжке пружины эта линия проходит через начало координат, сливаясь с линией инерционной силы при угловой скорости соо и определяя тем условие астатичности регулятора (равновесное положение грузов в любом положении при постоянной угловой скорости). Скорость вращения вала, при которой регулятор становится астатичным, зависит при заданной массе груза только от приведенной жесткости пружины В и может быть найдена из соотношения
Подстановка этих выражений приводит уравнение (331) к виду
или, после деления на шср, А
-=().
Решение уравнения (332) как квадратного относительно Ь дает
(332)
(333)
или после подстановки относительных величин t = --и 71=-
(334)
Эта формула показывает, что степень неравномерности регулятора определяется двумя параметрами: Е - относительной величиной разгона груза ИТ! - относительной угловой скоростью вращения вала регулятора.
На фиг. 288 дано графическое изображение этой формулы в виде зависимости степени неравномерности от относительного значения угловой скорости при относительной величине разгона грузов в качестве параметра. Из графика видно, что с уменьшением числа оборотов вала данного регулятора заданы и & = степень неравномерности быстро растет, причем
тем быстрее, чем больше величина . Требование широкого диапазона изменения числа оборотов коленчатого вала приводит к необходимости выполнения регулятора с малыми значениями но даже значение = 0,05 дает при значении tj = 0,2 степень неравномерности выше 50%.
Степень нечувствительности (отношение интервала чисел оборотов, обеспечивающего преодоление сил внутреннего трения регулятора и внешнего сопротивления органа, на который воздействует регулятор при смещении в обе стороны, к данному числу оборотов) может быть выражена через силу сопротивления и энергию регулятора:
где - степень нечувствительности; R - приведенное внутреннее сопротивлепие регулятора; tp - приведенное сопротивление регулируемого органа. Если все силы приведены к центру тяжести грузов, то
Е - пий^х.
Как видно, энергия регулятора для каждого данного положения грузов пропорциональна квадрату угловой скорости вращения вала регулятора, т. е. быстро падает с уменьшением числа оборотов. Сопротивление переста-

О 0.1 0,г 0.3 0,4 0,5 0,6 0,7 0,8 0,9 711.0
Фиг. 288. Зависимость степени неравномерности механическо/о всережимного регулятора от скоростного режима.
новки рейки топливного насоса зависит от его конструкции. На фиг. 289 показан примерный график сопротивления перестановки рейки насосов золотникового типа с различным числом насосных секций. Из графика видно, что при уменьшении числа оборотов вала регулятора сопротивление увеличивается. Поэтому степень нечувствительности всережимного механического регулятора с уменьшением скоростного режима быстро увеличивается.
Приведенный анализ показывает, что при уменьшении числа оборотов показатели данного регулятора ухудшаются. Чтобы регулятор обладал достаточно высокими показателями работы при малых числах оборотов, его приходится делать весьма мош.ным с большим избытком энергии на номинальном скоростном режиме.
Указанные обстоятельства ограничивали применение всережимных механических регуляторов для двигателей, работающих в транспортных условиях. Для улучшения механических всережимных регуляторов и расширения диапазона регулируемых скоростных режимов в некоторых регуляторах устанавливают две пружины (или больше), последовательно включающихся в работу. Жесткость пружин делается переменной. Применение нескольких пружин улучшает динамические качества механического всережимного регулятора, но усложняет его конструкцию.
Одним из недостатков механических всережимных регуляторов рассмотренного типа является необходимость поддерживать натяжение пружины, что утомляет водителя.
Этот недостаток устранен во всережимных механических регуляторах с переменным полем работы грузов. Принцип действия таких регуляторов показан ка
фиг. 290 Соотношение звеньев механизма регулятора выбрано так, что при каждом данном положении рычага / управления полному перемещению b рейки 5 насоса, ограниченному упорами, соответствует перемещение а груза, составляющее лишь долю от полного возможного его перемещения Л. Перестановка рычага / управления вправо смещает поле перемещения груза в сторону больших расстояний от оси вращения (фиг. 290- а^, a-i, з), а следовательно, и больших усилий пружины. Соответствующим подбором лсесткости пружины может быть обеспечено увеличение числа оборотов вала по мере удаления поля перемещения груза от оси вращения.

100 200 300 W0 500 600 700 800 900 lDDOnffOS/мин.
Фиг. 289. Зависимость сопротивления движения рейки насоса от числа оборотов его вала.
Последовательность реагирования регулятора и двигателя на перемещение рычага / следующая: в момент перестановки рычага / при свободе перемещения рейки 5 в поле, так как режим двигателя еще не изменился, грузы остаются неподвижными относительно оси вращения так же, как и нижний конец рычага 3. Перемещение оси 2 вызывает перемещение рейки 5 в сторону увеличения или уменьшения подачи в зависимости от того, переставлен рычаг / в направлении увеличения или уменьшегшя скоростного режима двигателя. Если перемещение рычага / больше, чем это допускает свобода перемещения рейки, то последняя доходит до упора 4i\ начинается перемещение нижнего конца рычага 3 и принудительное передвижение грузов в ту или и н у ю сторон у. Пр и
Фиг. 290. Схема всережимного механического регулятора.
ЭТОМ разность усилия fSS пружин и инерционной силы грузов нагружает весь механизм передачи движения от грузов к рейке и рычаг /. Эта нагрузка передается на механизм управления двигателя Под влиянием изменившейся подачи топлива скоростной режим работы двигателя меняется до тех пор, пока инерционная сила
груза не станет равной усилию пружины и рейка, вследствие вновь начавшегося перемещения грузов, не установится в положение, соответствующее равенству крутящего момента двигателя приведенному моменту сопротивлений при заданном скоростном режиме.
Передача на механизм регулятора разности усилий пружины и инерционной силы грузов возможна также при постепенном увеличении нагрузки двигателя (при постоянном положении рычага /) до значения, соответствующего внешней характеристике, когда рейка доводится до упора максимальной подачи и дальнейшее повышение нагрузки вызывает понижение скоростного режима двигателя. Так как положение механизма в этом случае фиксировано упором максимальной подачи (у рейки) и положением оси 2, то грузы остаются иа месте, а разность усилия пружины и инерционной силы грузов передается механизму. Аналогично механи:-}м нагружен, когда вал двигателя вращается при выключенной подаче с числом оборотов, большим того, который соответствует режиму, определяющемуся положением рычага / (езда под гору с включенным сцеплением и коробкой передач).
Для предохранения механизма регулятора от этих нагрузок в механизм передачи движения от рычага / к рычагу 5 (фиг. 290) вводится упругий элемент.
Для регулирования может использоваться изменение и других параметров. В частности, в транспортных двигателях нашли применение пневмати-
ческие регуляторы, в которых используется связь между разрежением во впускной трубе и числом оборотов коленчатого вала.
Во впускной трубе (фиг. 291) расположен диффузор 2, в котором может
вращаться дроссельная заслонка 3, управляемая водителем Разрежение в патрубке за дроссельной заслонкой по трубке / передается в левую полость корпуса регулятора, разделенного гибкой мембраной 8 на две полости. Правая полость 7 соединена с атмосферой отверстием 6. А^ембрана связана с регулирующей рейкой 4 топливного насоса и нагружена пружиной 5. Перемещение мембраны и связа1Н1ой с ней рейки топливного насоса в сторону выключения подачи начинается с момента, когда усилие Фиг 291 Схема брны, создающееся под влия-пневматнческого перепада давления по обе ее
регулятора. стороны, преодолевает усилие предварительной затяжки пружины. При каждом данном положении дроссельной заслонки разрежение за ней определяется скоростью воздуха. Скорость воздуха можно определить через коэффициент наполнения -Цу, предположив, что разрежение невелико и что изменением удельного объема воздуха при протекании через впускную систему можно пренебречь: 2у1 V п
где - рабочий объем цилиндров, обслуживаемых данной впускной трубой:
т -тактность двигателя; JJ-/ - активное проходное сечение дроссельной заслонки. По уравнению Бернулли
следовательно.

2g 2g \ SOxfx/ J
С изменением числа оборотов коленчатого вала коэффициент наполнения меняется, но это изменение не настолько значительно, чтобы резко изменить связь между разрежением и числом оборотов, подчиняющуюся закону квадратичной параболы.
Таким образом, зависимость усилий, действующих на диафрагму, от числа оборотов при различных положениях дроссельной заслонки имеет вид -семейства кривых, близких к параболам, так как
где - коэффициент использования площади диафрагмы; -диаметр диафрагмы. Такая зависимость изображена на фиг. 292, а. Если на ней нанести усилия пружины, соответствующие двум крайним положениям рейки топливного насоса (прямые АА и ВВ), то точки пересечения этих кривых с кривыми усилий диафрагмы дадут для каждого положения дроссельной заслонки диапазон изменения числа оборотов An, соответствующий перемещению рейки топливного насоса из одного крайнего положения в другое.
1 ...
16 17 18 [
19 ]
20
