Главная страница сайта
Российские промышленные издания (узловые агрегаты)
1 ...
16 17 18 [
19 ]
20 21 22 ...
27 34. Parekh С. J., Finite Element Solution System, Ph. D. Thesis. Univ. of Wa-les, Swansea. 1969 . , , , ( i j
35. Taylor С , Parekh C. J., Peters J. C, France P., Numerical Analysis of Linear Free Surface Seepage Problems, Proc Am. Soc. Civ. Eng. (будет опубликовано) .. , . , .
36. Herbert R.. Rushton K. R., Groundwater Flow Studies by Resistance Networks, Geotechnique 16, 53-75 (1966). , . , .
37 Neuman S. P., Wilherspoon P A., Finite Element Method of Analyzing Steady Seepage with a Free Surface, Water Resources Res., 6, №. 3, 889
38 Nernan S. P., Witherspoon P. A., Variational Principles for Confined and Unconfined Flow of Groundwater, Water Resources Res., 6, № 5 (19 b)
39. Javandel 1., Witherspoon P. A., Application of Ihe Finite Element Method to Transient Flow in Porous Media, Soc Pet. Eng. J., 241-252 (Sept. 1968).
40 Hurty W Dynamic Analysis of Structural Systems Using Component Modes, JAIA.A 6 (JuVy.1968). .
41. Gallagher R. H., Mallett R. H., Efficient Solution Processes for Finite Element Analysis of Transient Heat Conduction, Bell Aerosystems, Buffalo. 1969
42 Zienkiewicz O. C, Parekh C. J., Wills H J., The Application of Finite Ele- ments to Heat Conduction Problems Involving Latent Heat (будет опубликовано).
17.1. Введение
В гл. 13 было показано, как задачи, в которых в направлении одной из координат свойства не изменяются, можно упростить н что, используя ортогональные функции, можно исключить эту координату. Такой подход давно применяется при решении задач, содержащих в качестве одной из координат время, и фактически лежит в основе линейной теории колебаний. В этой главе мы будем рассматривать уравнение типа (16.13), полученное в результате дискретизации в предыдущей главе;
[К] Щ + [С] {6} [М]{6} + {РЩ = 0.
(17.1)
Это уравнение применимо ко всем упоминавшимся классам задач, для чего достаточно одну илн несколько матриц приравнять нулю. Уравнение связанной задачи тоже может быть приведено к такому виду.
17.2. Динамическое уравнение при периодическом входном сигнале
Пусть член {F}, представляющий собой возмущающую силу, имеет вид
{F{t)} = (Fo}e, (17.2)
где [Fo] не зависит от времени. Далее Предположим, что решение {6} существует и имеет такую же форму:
{6(0} = (5ЛЛ (17.3)
После подстановки этих выражений в (17.1) получим
{[К] + а [С] + а'[М]) (бЛ + {Fo) = 0. (17.4)
Решение уравнения (17.4) относительно (бо} дает возможную форму реакции, если для {6} удовлетворяются начальные условия.
Если а = мнимая величина, т. е. имеет вид
а = (0),
(17.5)
ДИНАМИЧЕСКИЕ ЗАДАЧИ. ПОЛУАНАЛИТИЧЕСКОЕ ИССЛЕДОВАНИЕ. КОЛЕБАНИЯ И СОБСТВЕННЫЕ ЗНАЧЕНИЯ
gal giat - cos ц ( gii,
И вещественная часть выражения (17.2) соответствует периодическому сигналу.
В общем случае {Fo} и (So} будем считать комплексными, тогда уравнение (17.4) можно рассматривать как совокупность двух уравнений, получающихся в результате приравнивания вещественных и мнимых частей.
Таким образом, если
[F } = {Fo} + i{Fa},
{}={} + i{},
где все величины с одной и двумя черточками сверху вещественные, то, приравнивая вещественную и мнимую части (17.4), получаем систему двух уравнений, которую можно записать в матричном виде:
(17.7а) (17.76)
[К]-ч>ЧМ] -со [С] L -ш[С1 lK]-<u4M]i
6,J If,
Уравнения (17.7) образуют систему, в которую входят только вещественные величины. В результате решения этой системы можно определить реакцию на любой периодический сигнал. Эта система уже не является полсЗжительно определенной, хотя она по-прежнему симметрична.
При периодическом сигнале решение после начального переходного периода не чувствительно к начальным условиям и поэтому найденное приближенное решение будет характеризовать устайовившееся поведение. Это справедливо как для задач о динамическом поведении конструкций, так и для задач теплопроводности, при решении которых надо принять
[М] = 0.
17.3. Собственные частоты
Если матрица [С] равна нулю, т. е. рассматривается динамическая задача без демпфирования, и если внешних возмущений {F} нет, то уравнение (17.1) принимает вид
[/C](6} + [yW]-g-{6}=0. (17.8)
Это уравнение имеет вещественное периодическое решение {6} = {бо} cos ot,
если выполняется условие
([]-ш^[Лl])(бo
= 0.
(17.9)
Последнее равенство возможно только при некоторых значениях ш, при которых определитель заключенной в скобки матрицы обращается в нуль. Поскольку этот определитель имеет порядок Л (при размерности матрицы иХ ), в общем случае существует п вещественных корней ш^. Они определяют собственные угловые частоты системы, а задача их нахождения представляет собой типичную задачу о собственных значениях [1]
det[iC]-a4M] = 0. (17.10)
В динамических задачах о колебаниях п корней этого уравнения вещественные.
Каждая частота, при которой выполняется условие (17.9), определяет вектор {So}n, величина компонент которого произвольна, а их отношения принимают заданные значения. Такие векторы называются модами системы.
На практике удобно вводить масштаб для этих векторов так, чтобы
{6j}[ [Af] (бо); = / (единичная матрица). (17-11)
Масштабированные таким образом векторы называются нормированными модами (собственными функциями) системы.
Еще одно важное свойство мод состоит в том, что для любых двух различных частот ( ф j
(бо}[[М] {б„}; = 0.
(17.12)
Это свойство называется свойством ортогональности мод [1]. Интересно отметить, что матрица ([Л] - <D[Af]) появляется и при решении задач о поведении систем при вынужденных колебаниях [уравнения (17.7)]. Как известно, при приближении величины (О к собственной частоте реакция увеличивается и возникает явление резонанса.
17.4. Решение задачи о собственных значениях
17.4.1. Общие замечания
При нахождении собственных значений редко прибегают к записи определителя (17.10) в виде полинома а, как праиило, используют другие методы. Такие методы описаны в специальных учебниках [1, 2], и сейчас многие библиотеки стандартных программ содержат соответствующие програ.ммы.
В большинстве случаев рассматривается частная задача о собственных значениях
(17.13)
где [Я] -симметричная положительно определенная матрица. Уравнение (17.9) после обращения матрицы [К\ и введения обозначения Я = можно записать в виде
(17.14)
однако симметрии н пбуцр^л г,1туияр нрт
Если записать матрицу [К\в виде
[к\=тц и [/ci-=w-[L]-.
где [L] - матрица с нулевыми коэффициентами над главной диагональю, то после умножения (17.14) на [LY будем иметь
Полагая
[Lf{6o} = W. (17.15)
окончательно получим уравнение
[н]{х) = Х{х}, (17.16)
которое совпадает с (17.13), так как матрица [Я] теперь симметрична и имеет вид
(17.17)
[H] = [Lr[M\[Lf-\
После определения Л (всех или только нескольких наибольших значений, которые соответствуют основным тонам) находятся моды {X}, а затем с помощью (17.15) и моды {бо.
17.4.2. Свободные колебания
В статических задачах всегда вводится необходимое число условий закрепления для обеспечения возможности получения обращения или, что то же самое, единственности решения
уравнений статики (см. гл. 1). Когда такие условия отсутствуют, как, например, при полете ракеты, произвольное задание минимального необходимого числа условий закрепления позволяет получить решение статической задачи, причем эти условия не влияют на величины напряжений. В динамических задачах задание таких условий недопустимо и часто приходится сталкиваться с задачей о свободных колебаниях, в которой матрица [К\ сингулярна и поэтому не имеет обратной.
Использование простого искусственного приема позволяет сделать возможным применение к такой задаче общих методов,
описанных в предыдущем разделе. Уравнение (17.9) записы-вается в виде
[([К] + а [М]) - ((0 + а) (уИЦ {б,} = О,
(17.18)
где а - произвольная постоянная того же порядка, что и искомая величина а'. Новая матрица {{К\-\-а{М\) может быть обращена, и, следовательно, обычным способом можно найти (ш^ + а). Этот простой, но эффективный путь преодоления существенных трудностей предложен вперв.ые Коксом [За].
17.4.3. Экономичные методы определения собственных значений
Какой бы метод ни использовался для определения собственных значений и собственных функций системы, необходимо проделать на порядок больше вычислений, чем при решении соответствующей статической задачи. К счастью, собственные значения можно достаточно точно определить при меньшем, чем в случае статической задачи, числе степеней свободы.
Если при решении статической задачи используется достаточно мелкое разбиение, то можно сократить число степенен свободы й сосредоточить коэффициенты, учитывающие влияние массы н демпфирования, в меньшем числе узловых параметров. Этот способ предложен Айронсом [4, 5] и несколько позднее Гайяном [6]. От читателя, по-видимому, не ускользнет его сходство с описанным в гл. 7 способом прстроения сложных элементов.
Пусть все степени свободы {5} разделены на две части'
(17.19)
Предположим, что перемещения S однозначно выражаются через перемещения б. В соответствии с этим последние будем называть главными, а первые - вспомогательными переменными. Таким образом,
{S} = [L]{6} (17.20)
и
Г
{б} =
(17.21)
где [L] - матрица, характеризующая связь между этими перемещениями.
Динамическое уравнение всей системы
/C]{6) + [Af]-{6}=0 (17.22)
ДОЛЖНО быть записано с учетом ограничения на деформации, налагаемого соотношением (17.21). Новое уравнение лучше всего получить, минимизируя полную потенциальную энергию системы по уменьшенному числу параметров.
В гл. 2 показано, что, используя принцип Даламбера для динамических сил, потенциальную энергию можно записать в виде
x = {6}4Kl{6}-f([M]{6})(6}.
После некоторых преобразований получаем
где матрицы
-j=[K.m+[M\ {б}=о.
(17.23)
(17.24)
(17.25)
соответствуют меньшему числу степеней свободы, связанных с Ы.
Выражения (17.25) можно получить непосредственно, используя правила рассмотренного в гл. 1 контрградиентного преобразования, если выражение (17.21) принять за определение матрицы этого преобразования.
Важно установить связь между вспомогательными и главными перемещениями. При этом уместно сделать приемлемое с инженерной точки зрения предположение, что картина деформации не изменится, если вместо нагрузок задать перемещения {б}. В соответствии с этим, записывая по аналогии с (17.19) соотношение
(17.26)
получаем
IKV {6} + m {а} = о,
поскольку вспомогательные узлы не нагружены, и
(17.27)
или
Приложения этого метода хорошо описаны в литературе [7, 8] и будут рассмотрены на приведенных ниже примера??,
17.5. Некоторые примеры определения собственных значений
Приведем лишь несколько примеров из множества решенных практических задач.
/7.5./. Колебания пластин
На фиг. 17.1 представлены результаты расчета колебаний прямоугольной консольной пластины, полученные при использо-
Фиг. I7.I: Моды консольной пластины. Исходые давиые для расчета при разбиении иа 4 треугольных элемента: Е=2,02.10 Н/м . (=1,25 см, L=5,08 см, 6=2,54 см, v=0,3, p=7,65-II) Н/м'. Числа обозначают частоты в герцах, полученные при использовании: i) точного решения (91; 2) несогласованного треугольника; 3) согласованного треугольника с поправочной функцией (10.28) и 4) согласованного треугольника с поправочной функцией 1Ш.2Э).
вании всего лишь четырех треугольных элементов. Результаты сравниваются с результатами сложных расчетов Бартона [9]. Видно, что использование несогласованного треугольника приводит к лучшим результатам, чем использование уточненных соотношений. Точность определения и частот и собственных функций вполне удовлетворительна.
Более полно результаты, полученные при использовании несогласованных треугольников, для различных разбиений приведены в табл. 17.1 [7].
Таблица 17.1
Сравнение теоретических и экспериментальных результатов определения частот прямоугольной кансольной пластины постоянной толщины (длина а, ширина а/2) [7]
| | ш/У D/pfta< |
| | | | | Расчет методом | конечных элементов |
| Результаты ьартона | | (несогласованный треугольник) |
| | | Экспериментальные | Сетка | | Сетка 2X8 для половины |
| | Метод | | результаты Плаикетта | Сетка | пластины с учетом |
| | Экспери- | 2X1, | 4X2, | симметрии, что |
| | Ритиа | | 4 элемента | 16 элементов | эквивалентно использованию 64 элементов |
| 3,47 | 3,42) | 3,5Э | 3,39 | 3,44 | 3,44(0) |
| 14,93 | 14,52) | 14,50 | 15,30 | 14,76 | 14,77 (а) |
| 21,26 | 20,86 | 21,70 | 21,16 | 21,60 | 21,50 (с) |
| 48,71 | 46,90 | 48.10 | 49,47 | 48,28 | 48,19 (а) |
| | | 60,50 | 67,46 | 60,56 | 60,54 (с) |
| | | 92,30 | | 88,84 | 91,79 (с) |
| 94,49 | 93,99 | 92.80 118,70 | | 92,24 117,72 | 92,78 (а) 119,34 (с) |
| | | 125,10 | | 118,96 | 124,23 (с) |
| | | 154,00 | | | 153,15 (а) |
| | | 176,00 | | | 174,46 (с) |
| | | 196,00 | | | 199,61 (с) |
) Результаты, скорректированные Вартоном в соответствии с проведенными им испытаниями. Буквами (с) н (а) обозначены симметричные и антисимметричные моды.
Решение подобной задачи иллюстрируется на фиг. 17.2. При решении проверялась эффективность экономичного метода определения собственных значений. Видно, что при сокращении числа степеней свободы с 90 до 6 первые четыре частоты изменяются очень мало.
! В литературе так много примеров расчета колебаний пла-
/ стик, что их невозможно перечислить.


Расчет с учетом всеос степеней сво 5оды (90)
исключены степени свободы узлов, не от/иеченных кружками.
ЧисЛ9-щнов!1ых перемещении (ЧОП) -54
Исключены все степени свободы крсииепо-Уперечныа: перемещенчй oSSedeHHNi: кружками узлов.
уоп =18
Исключены все степени свободы кроме поперечных перемещений обведенных кружками узлов
ЧОП = в
Мо9а | |
| 3,469 |
| 8,535 |
| 21,450 |
| 27,059 |
| |
| oijDIpla |
| 3,470 |
| 8,540 |
| 21,559 |
| 27,215 |
| |
| |
| 3,470 |
| 8,543 |
| 21,645 |
| 27,296 |
| |
| |
| 3.473 |
| 8,604 |
| 22,690 |
| 29,490 |
Фиг. 17.2, Исключение степеней свободы при определении собственных частот квадратной консольной пластины.
17.5.2. Плоская задача о колебаниях
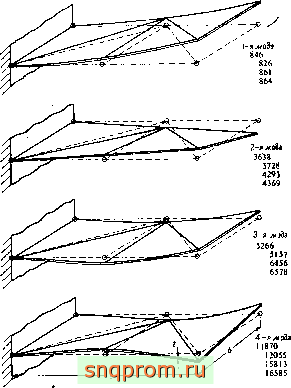
На фиг. 17.3а и 17.36 приведены результаты расчета Клуха и Чопры [10] колебаний сечення земляной дамбы. При расчете использовались простые треугольные элементы.
17.5.3. Колебания оболочек
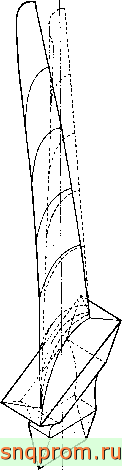
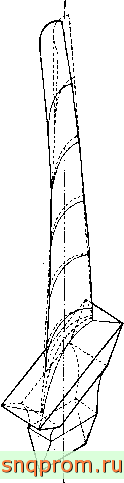
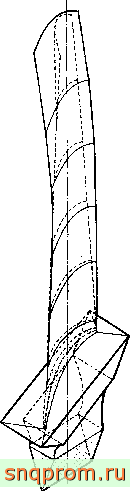
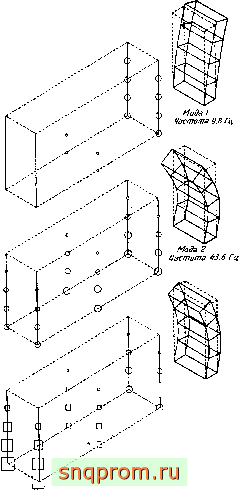
Очевидно, что изложенный метод можно применить при решении любых двумерных илн трехмерных задач для упругой сплошной среды. В частности, большой интерес представляют задачи о колебаниях оболочек. В противоположность предыдущему простому примеру на фиг. 17.4 приведены результаты использования сложных элементов толстых оболочек, описанных в гл. 14, прн решении задачи о колебаниях турбинной лопатки [11, 12]. Показанные на фиг. 17 5а и 17.56 элементы такого же типа используются для динамического расчета арочной плотины.
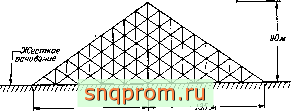
-135 м
Фнг. 17.3а. Конечно-элементная идеализация земляной дамбы.
Moffa 1 и> = 1,1\ рад/с
МоЗа 5 о^ = гО,Пред/с
МоЯз2ш^\г,Ы ряд/с
Модаб oj = 2i,\0раЗ/с
МоЗаА ш=\Ч,г\раа/с МодаЗ ш = 25,95 раЗ/с
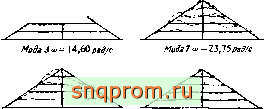
Фнг. 17.36. Моды и частоты собственных колебаний земляной дамбы [10].
Верхнее
ceveHue


----Зэмок-----

Вид спереди
Вид с5оиу
Фиг. 17.4, Колебания турбинной лопаткн, рассчитываемой как толстая
обаточка.
а-элементы параболического типа; б -моды и частоты, Сравнение с экспериментом. Мода 1-1-я- форма поперечных колебаний. Измеренная- частота 517 Гц. Вычисленное значение 518 Гц. Мода 2-1-я форма поперечных ко.пебаний вдоль кромки. Измеренная частота 1326 Гц. Вычисленное значение 1692 Гц. Мода 3-1-я форма крутильных колебаияй. Измеренная частота 2885 Гц. Вычисленное значение 2686 Гц. Мода 4 -2-я форма поперечных колебаний. Измеренная частота 2510 Гц. Вычисленное значение 2794 Гц.
Фиг. 17.4. (продолжение,).

Фиг. 17.4. (продолжение).
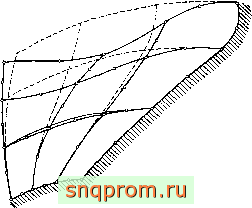
Фиг, 17.5а, Сетка 3X3 параболических толстых оболочечных элементов, использованная для расчета колебания арочной плотины.

Фиг. 17,56. Первая мода; частота 2,20 Гц.
Некоторые другие примеры динамического расчета оболочек содержатся в работах [13-16]. В работе [7] используются трехмерные изопараметрические элементы.
17.5.4. Волновое уравнение. Задачи электромагнетизма и гидродинамики
Как было показано в предыдущей главе, основное уравнение динамики (17.1) может описывать разнообразные задачи, не связанные с расчетом конструкций. В задаче о собственных значениях матрицы массы и жесткости могут иметь другой физический смысл.
Частным случаем рассмотренных ранее общих уравнений является известное волновое уравнение, которое для двумерных задач имеет вид
дЧ ,д^ I дЧ
Т^5Т:5---- = 0. (l/.i8)
Если граничные условия не оказывают возмущающего действия, получаем задачу о собственных значениях, встречающуюся в различных областях физики.
Сначала рассмотрим ее применительно к теорви электромагнитных полей [17]. На фиг. 17.6 показаны моды поля в задаче о волноводе. При расчете использовались простые треугольные элементы. Более сложная задача о трехмерных колебаниях рассмотрена в работе [17].
Аналогичное уравнение довольно хорошо описывает поверхностные волны в некотором объеме жидкости:
д-ф\ . д
g др
ду ) (17.29)
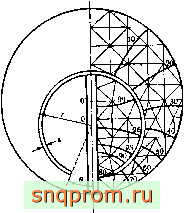
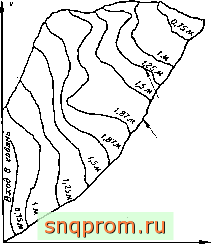
Фнг. 17,6, Серповидный волновод; моды
электромагнитного поля, d -наружный диаметр; C0=l,3d; r=0,29d; S=O.055d; е=22°.
Здесь Л -средняя глубина, ф -превышение уровня воды над средним и g -ускорение силы тяжести. С помощью этого уравнения нетрудно подсчитать собственные частоты воды в гавани [18]. На фиг. 17,7 показана форма колебаний воды в одной из гаваней.
1ЯВ полная га в сизиеаи
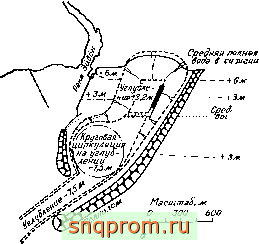
Колебания бассейна
Линия равных геризонтальныос движений
ПреЗельная поверхность воЗы
МодаЗ Ф Частота S5 Ги
Фиг. 17.8. Колебания объема жидкости при наличии свободной поверхности. Расчет трехмерной задачи с использованием параболических элементов. О аиплиту/а давления; □ смена знака.
Фиг. 17.7. Колебания воды в естественной гавани, а -план; б -линии уровней амплитуд..
17.5.5. Связанные задачи гидродинамики
Эта задача была сформулирована в предыдущей главе. В случае отсутствия возмущающей силы и демпфирования опять возникает задача о собственных значениях.
Если жидкость несжимаема, то следует просто ввести матрицу присоединенных масс. В гл. 15 довольно подробно рассматривался вопрос построения такой матрицы, так что добавление ее не представляет особых затруднений. Этот подход к решению задачи впервые описан Зенкевичем и др. [19] и впоследствии был использован Баком и др. [20].
При учете сжимаемости жидкости задача несколько усложняется, поскольку колебания жидкости и конструкции взаимосвязаны.
Простой пример двумерной задачи, иллюстрирующий взаимодействие идеализированной плотины и жидкости, представлен на фиг. 17.8. Этот пример показывает эффективность использования различных разбиений на элементы [22].
При сведении связанной задачи к обычной задаче о собственных значениях целесообразно использовать специальные преобразования. Некоторые такие преобразования описаны в работе [21]. Другой метод вычислений изложен Айронсом [23].
17.6. Решения нестационарных задач. Метод нормированных собственных функций
В предыдущей главе обсуждалось решение нестационарных задач с помощью различных рекуррентных соотношений. Однако если известны собственные частоты и собственные функции системы без демпфирования, то сравнительно нетрудно определить реакцию на неустановившиеся воздействия системы с демпфированием, которая описывается уравнением (17.1).
Этот метод изложен во многих учебниках. Хотя и приближенно, он позволяет вычислить реакции на такие сложные воздействия, как толчки при землетрясениях и др. [20, 24, 25].
Рассматривая опять основное уравнение (17.1)
\К] {6} + [С] -- {6} + [М] {5} + {F (t)} = О,
отметим, что любое движение можно представить в виде линейной комбинации собственных функций {бо}г, полученных в результате решения задачи о собственных значениях
([/С]-(йЧМ]){5о} = 0.
Таким образом, можно записать
(17.9)
(17.30)
где матрица [До] содержит все собственные функции (нормированные), а {г (I)} - коэффициенты пропорциональности при собственных функциях.
Если теперь подставить (17.30) в (17.1) и результат умножить на [До], то получим
[Ао1 [К] [До] {г) + [ЫГ [С] 1\] +
+ [До] [М] [До] -gr {z} + [V {F} = 0. (17.31) В соответствии со свойством ортогональности [см. 17.12)] .г f О при i ф /,
Кроме того, по определению
[С]{б„}, = со[М]{б„},.
Следовательно,
(-0 при ( ф i.
Если также предположить), что выполняются соотношения
О при i ф j, при г=/,
то система (17.31) будет содержать только диагональные члены. Следовательно, при нормированных собственных функциях получаем систему обыкновенных дифференциальных уравнений-
{ад[[с]{боЬ={2
(17.32)
Каждое из этих уравнений решается элементарно, а затем с помощью соотношения (17.30) строится полное решение.
Этот метод особенно удобен, если все силы {F{t)} одинаково меняются со временем. Если, например, основание конструкции движется с ускорением U(t), то можно считать, что это основание неподвижно, а к самой конструкции в узлах (фиг. 17.9) приложены силы
-[M]{A}U. (17.33)
) Это предположение является обоснованным, так как в предыдущей главе было показано, что матрица [С] по форме аиалогичиа матрице [М].
1 ...
16 17 18 [
19 ]
20 21 22 ...
27
