Главная страница сайта
Российские промышленные издания (узловые агрегаты)
1 ...
5 6 7 [
8 ]
9 10 11 ...
14 3.S. ТРЕНИЕ в ПОДШИПНИКАХ
Момент сопротивления вращению ротора - одна из важных количественных характеристик узла - складывается из моментов для отдельных подшипников, которые в свою очередь слагаются из составляющих момента, обусловленных трением шариков о кольца, закрепленные на роторе, и трением сепаратора о базу того же кольца (при базировании относительно колец). Трение шарика о кольцо определяется полем скорости в области контакта и толщиной пленки. Толщина пленки в контакте зависит от нагрузки или давления на контакт и скорости качения (которая в свою очередь определяется кинематикой шарика). Следовательно, задачу определения кинематики шарика, сепаратора, толщины пленки и задачу определения нагрузок необходимо рассматривать совместно.
Проведем аналитическое исследование, в котором сделаем ряд упрощающих предположений. Рассмотрим шариковый подшипник без отклонений формы и размеров, угловые скорости колец которого равны fi (рис. 3.17). Предположим, что решена задача определения толщины пленок и нагрузок в контактах, т. е. проведен силовой расчет подшипника в предположении идеальной кинематики шарика и без учета центробежной силы. Будем считать также, что отличие переменных со., со/от кинематических значений мало. Это отличие объясняется воздействием сепаратора, который вследствие трения о базу (при базировании относительно колец) тормозит движение шарика по окружности и замедляет его собственное вращение из-за трения в окне сепаратора, а также воздействием гироскопических моментов шарика, возникающих в результате регулярной прецессии вектора угловой скорости шарика.
Однако сила, с которой сепаратор воздействует на шарик, невелика. Кроме того, вязкость в контакте шарик - кольцо, вследствие ее зкспонен-циальной зависимости от давления, значительна, а толщина пленки мала. Последнее приводит к тому, что уже малые проскальзывания шарика о дорожки качения обусловливают большие силы трения. Поэтому воздействие сепаратора и гироскопических моментов вызывает лишь незначительные проскальзывания и кинематика шарика остается почти идеальной. Далее, силы трения, возникающие в контактах шарик - кольцо, шарик - сепаратор для подшипника, собранного с осевым натягом, пренебрежимо малы по сравнению с упругими силами.
Таким образом, задача определения кинематических переменных со, СО/, со , 0}j (см. рис. 3.17, 3.18) отделяется от задачи определения положения центра шарика, нагрузок и толщины пленок в контактах. Именно в такой упрощенной постановке, не теряющей тем ие менее физического смысла, и будем решать задачу.
Пусть все шарики вследствие симметрии находятся в одинаковых условиях. Будем следить за движением одного из них, центр которого в данный момент лежит на оси Ох. Тогда вектор угловой скорости шарика при
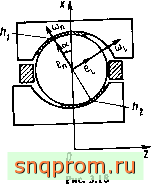
Рис. 3.17
w = coe + co e + a;,e
где е„ = е^ coso; - esina - единичный вектор вдоль линии контактов; е/ = ecosa + sina - единичный вектор, перпендикулярный линии контактов, лежащий в плоскости Oxz; е^, е^, е^ - единичные векторы системы координат Oxyz.
Поскольку составляющие угловой скорости со , со и со/не зависят от времени, го вектор угловой скорости шарика прецессирует вокруг оси Oz, а вектор угловой скорости зтой прецессии равен cOje. Уравнение момента импульса шарика имеет в этом случае вид
н/[со e,w] =М.
(3.110)
где / = 87гр/?* /15 = ImjjR /5 - момент инерции шара радиусом R и массой р - плотность материала шарика; М - момент сил относительно центра, действующих со стороны колец и сепаратора; [а, Ь] - векторное произведение векторов а и Ь, Представим последнее уравнение в проекциях на векторы €.,6,6:
+ /сосо, [е е,] = Л/е^ + М^е^ + М,е^ .
Умножая полученное уравнение скалярно на единичные векторы е, , е^, е/, образующие правую тройку, т. е. [е^, е/] = е^, получим
-/сОрСо^cosa = cosa - sina = ;

Рис. 3.19
/со (cj cosa + cosina) = = Л/ ; - /cj cj, sina = sina + М cosa = М„
L Т X Z /
(3.111)
где Л/ , Af.r> / ~ проекции момента сил, действующих на шарик, на векторы е„, е., е/ базиса, соответствующего движению шарика. Кроме того, вследствие равномерного движения шарика по окружности, проекции на вектор сил, действующих на него со стороны сепаратора (Fg.) и колец (F., должны быть уравновешены, т. е.
F +F =0. гт ст
(3.112)
По соотношениям (3.111), (3.112) можно определить неизвестные кинематические переменные cjp, cj , coj, to..
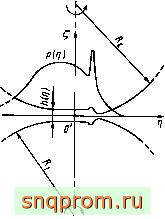
Получим вьфажения для М„, Mj, М., F.. Определим силу и момент, возникающие в контакте шарика с ш-мкольцом. Рассмотрим распределение скоростей скольжения на указанном контакте. Введем прямоугольную систему координат Orjlf, которая связана в данный момент с контактом (рис. 3.19). Оси О'г], Of направим вдоль малой и большой осей эллиптической площадки контакта, а также по нормали к ней. Единичные векторы введенной системы координат е^, е^, ej. связаны с векторами е„, е., е, соотношениями е^ = е., = (-1) с/; Cj. = (-1) e и образуют правую тройку: [е^, е^] = ej.. Найдем распределение скоростей поверхности шарика и кольца в области контакта. Для этого опишем геометрию поверхностей в контакте как без учета, так и с учетом деформации.
Радиус-вектор г, начало которого есть центр шарика, а конец - точка на его поверхности с координатами т?, дается формулой
t=i-- +5.+
t2 Т)
(3.113)
где r, r. - радиусы кривизны поверхности деформированного шарика; 6j - упругая деформация шарика в центре контакта.
Найдем эти величины. Обозначив радиусы кривизны поверхности кольца в центре контакта через ,г°, запишем уравнения начальных форм поверхностей кольца и шарика
2/
Заметим, что г| > О, г ° > О для наружного кольца и > О, г ° < О для внутреннего кольца. Обозначим через г j, rj радиусы кривизны деформированной поверхности кольца и зададим деформированные поверхности кольца и шарика соответственно функциями
Гг,а,т?) =
(3.114)
(3.115)
где г,Вь - комбинации упругих констант материалов кольца и шарика; 5 5 упругие деформации кольца и шарика в центре контакта (см. подразд. 2.1);
G у/а - (5?- 1?)
Условие соприкосновения тел в каждой точке области контакта имеет вид fj, - f;. = 5, где 5 - упругое сближение шарика с кольцом. Таким образом,
= 8 + fi-
-) +
Из этого соотношения определяем /и подставляем в формулы (3,114), (3.115):
27f
г с
Л ггЧ
Из этих уравнений находим неизвестные параметры
5. 5ь =
ъ
0, 2 1 1
(3.116)
Д o .0 - b
Для большинства подшиш1иков выполняются приближенные равенства

0,5.
Вследствие высокой степени прилегания поверхностей шарика и кольца в направлении большой оси контакта
2/рО 1/г 2/р?.
поэтому кривизны деформированных поверхностей кольца и шарика вдоль оси О % незначительно отличаются от начальных кривизн (1/гС = = 1/4*2/7°).
Воспользуемся выражением (3.113) и найдем распределение скоростей поверхности шарика на площадке контакта:
v = w/*e+[w,r]=w*e +
11+5 +-=- + -
2 2. 2.;
Проекции скорости на плоскость otj вычисляем по формулам
vJ = a;,*-( l) [a; S + a;,(-5,---)]; ,
2-е 2/-;
2 К
В последней формуле можно пренебречь слагаемыми в скобках, поскольку, как правило, cj. со и полуось b площадки контакта вдоль 0г\ больше характерных значений 5, Ь^/(2г^ ), д^/(2г^ ), где а,Ь - большая и малая полуоси контакта. Кроме того, b 1(2г^ ) - меньше д^/(2г^ ). Используя формулы Герца (2.17) - (2.20), определим 5/, aa/ilr ) :
PR г/3 PRf
1п(47),
где R - приведенный радиус кривизны площадки контакта; j - отношение полуосей площадки контакта. Тогда
2R-f 2г^ ~ г*1п(47)
Здесь использованы асимптотические формулы для коэффициентов вытянутой площадки контакта:
л„ = 1,240773, *г,= 1.2407г->
= 0,31017т- = 0,769677-31п(4т);
поскольку Л / , 7 1.
Таким образом, проекции скорости поверхности шарика рассчитываем по формулам:
< = c *-(-l) (co S + c.,°-a;/l).
(3.117)
Найдем скорость поверхности кольца в области контакта. Расстояние от центра контакта до оси подшипника равно R* (без учета деформации кольца). Тогда скорость в этой точке равна П^Л^е^. Вектор угловой скорости кольца равен (-1) Л^ (-е^. sina + ecosa). Вектор г с началом в центре контакта и концом на поверхности кольца с координатами ri
r = 7je + ?e, + (- , + +)е,.
Тогда скорость поверхности кольца
у'=П„,Я *е + т т 1\
о cosa sina
Пренебрегая, как и выше, 5 ит j(2гр, получаем
5 cosa
= А* +n (-l) asina +
2/-:
Таким образом, скорости скольжения поверхности шарика относительно поверхности кольца в области контакта распределяются в соответствии с соотношениями:
Ду,. = Ду° + cj 77: 5 5 тп
Ду = Ду - CJ +
л п тп о
(3.118)
где
Ду° =
Р7°
= (со-а;*)Л*-(-1)
проскальзывание в центре контакта; со* , cJj - кинематические значения cjg и СО/, т. е. такие, при которых скольжения в центрах контактов равны
нулю; = (-1) (аЗ + fisina), = (-l) (cj/ - cosa) -
проекции угловой скорости шарика относительно ш-го кольца соответственно на векторы е„ и е/,
Третье слагаемое во второй формуле (3.118), так называемое дифференциальное проскальзывание, обусловлено кривизной контактирующих тел в плоскости, перпендикулярной скорости центра шарика. Составляющая Ду скорости проскальзывания обращается в нуль в точках с координатами
, P7 ± V
т
7V- 4
Такие точки существуют только при положительном значении подкоренного выражения. При со = со. = О, как следует из первой формулы (3.118), на линиях S = Si, S = Ь скорость проскальзывания равна нулю.
Распределение скоростей проскальзывания в соответствии с (3.118) вызовет касательные напряжения г = т^е^ + т^е^ на поверхности шарика. Эти напряжения следует рассчитывать на основании термогидродинамической теории смазки, т. е. с учетом тепловых явлений в тонком слое смазочного материала. Кроме того, высокие контактные давления и малое время
♦ f
пребывания частицы в контакте приводят к тому, что смазочный материал приобретает свойства, отличающие его от обычных жидкостей, для которых справедлива линейная связь между касательным напряжением и производной скорости поперек слоя, а именно проявляются релаксационные свойства, т. е. при данной скорости сдвига напряжение устанавливается не мгно-нснно, а,как правило, зависит от времени по экспоненциальному закону. Вязкость жидкости зависит от давления и температуры, и погрешность в оценке реальной температуры в области контакта, например на 10 К, может привести к занижению значения вязкости и, следовательно, сдвиговых напряжений на 30 ... 40 %. Следует также учитывать снижение пьезо-коэффициента вязкости при повышении температуры. Для правильного определения температуры необходимо учитывать разогрев смазочного материала в области контакта вследствие выделения теплоты.
Будем считать, что зависимость вязкости от давления и температуры описывается формулой, учитывающей уменьшение пьезокоэффициента при повышении температуры:
nip.T) = Но ехр
[ар-к(Т-То)]р-б'(Т-То)
(3.119)
гдемо =М(0, То),
В соответствии с термогидродинамической теорией смазки, с учетом прогрева смазочной пленки найдем распределение касательных напряжений в контакте. Примем вектор касательного напряжения постоянным в поперечном направлении пленки и коллинеарньп вектору скорости проскальзывания:
= -Ац(р, Т) ,т^ = -Ац(р, Т)
(3.120)
Здесь И - локальная толщина пленки (которая, как мы считаем, постоянна в контакте), а Л - коэффициент, вьгаисляемый по формуле
arshAo
AoVl + Ло У М(Р, Л (5+кр)
(3.121)
V(Avp + (Ay) ,
где kj - теплопроводность смазочного материала; Т - равные по значению температуры поверхностей контактирующих тел.
Отметим, что формулы (3.120) не учитывают релаксацию касательных напряжений. Зная распределение касательных напряжений, можно найти силу F и момент М, действующие на шарик:
Р = Я(г^е^ + %е^)с??с?т?;
% h
(3.122)
T. e. вычисляя указанные интегралы по области контакта G, которая является эллипсом с большой и малой полуосями а тлЬ. При вьгаислении М мы вновь пренебрегли слагаемьил j (2rJJ). Распределение давления в контакте вьмисляем по формуле
P(S, 7?) = Ро Vl-5Vfl -Vlb\
Вследствие сложности подьштегральных функций в (3.122), для вычисления F и М получим приближенные формулы. Предположим вначале, что скорость проскальзывания настолько мала, что Ло 1. Тогда arshAo Aq ,
VI +Ло 1 и Л 1. При а = ар - k(T-To),Q = a ро получим F = * Р [-s(.T-TJ
[eg;/Avf/(S,7j)c?dTj + G
+ eJJAv/(£,r,)dSd7j]; G
(3.123)
[efJJ(vjT,-Av /(S,T})dgdTj + G
+ Я km. T?)
G P?
(3.124)
где/(?. Tj) = exp { QVl-S/a -Vlb
Подстановка вторых слагаемых в формулах (3.118) не влияет на значение F (3.123) вследствие антисимметричности подьштегральных выражений. По этой же причине подстановка первых слагаемых (3.118) в первый интеграл (3.124) не меняет значения М. При вычислении второго интеграла в (3.124) пренебрежем квадратом малой величины J/p?. Учитывая все это, получим
Г=: о^хр {-8(Г- Г„)
[{Ahiv) im,ri)dkdn + G
+ е^ nem,ri)dkdn]; Рп G
Проведем замену
5 = arcos(p; tj = brsaap; ddri = abrdrdip и введем обозначения
.(0 = - [е^Ш-1) + 1];
Or (О) = 4 Ге* (---+ -) +---7 1 ;
S = тгоЬ - площадь контакта. Тогда
(3,125)
Пт, П) dm = abSdri г exp { Qy/l-i ]d,fi-
G 0 0
= s Jexp { eVb) d{r) = sasiQ);
Sn\]fMdkdv = abidr fr[ Jexp GvT-P
6sinv
G ri
=,-[J Jrexp {eVr}d(.*) = f [Ja,(0. Теперь вьфажения для силы и момента примут вид
dip =
-s(r- Г„)
М.ехр {-8(Г-Г,)} /2хьП 4.
(3.126)
(3.127)
Из полученных формул следует, что в момент входят два слагаемых, обусловленных составляющей угловой скорости шарика, перпендикулярной области контакта, и дифференциальным проскальзыванием. При этом
ctrPo ехр
-5(Т-То)
= аг1л{0,Т)
представляет собой эффективную вязкость смазочного материала при со Ф Ф 0. Если бы вязкость в области контакта не зависела от давления и бьша равна а^.ц (О, Т), то она обусловила бы момент, вычисляемый по формуле (3.127), Для доказательства этого утверждения достаточно показать, что при Ро О (когда значение давления на всем контакте стремится к нулю) коэффициент будет стремиться к единице. Но при Рл О параметр Q также стремится к нулю. Разложим aiQ) в окрестности 6 = 0:
аД0 =4
1 6
+---
Q* J
= 4[
е' с* 6 6
-+ -+0(G*)](---
---+- +
3 11
+1+--1 + - +0(1) + -
Q Q 4
---+
2 3 - +-
] =1+0(1).
Таким образом, lima;. (2) = 1, Аналогично можно показать, что
lima,(0 = 1.
G-0
Величина ajp(0, 7) представляет собой эффективную вязкость смазочного материала при чистом скольжении. В формулу (3,126) входят два слагаемых: первое - составляющая силы, обусловленная скольжением в центре контакта, второе - сила, пропорциональная угловой скорости качения, причиной возникновения которой является дифференциальное проскальзывание. Даже при чистом качении шарика по желобу кольца возникает сила трения качения [см. (3.126)].
Коэффициенты и а^ характеризуют увеличение вязкости, обусловленное высокими контактными давлениями. Для подшипников характерно G = 6 ... 20. Коэффициенты а и а^ принимают в зависимости от параметра нагружения Q следующие значения:
Q----б
а,. . . . 52 aj. . . . 112
250 652
1286 3965
6970 24 865
94 535 406 811
8,32-10 4,6110
Экспоненциальная зависимость вязкости от давления приводит к изменению эффективной вязкости смазочного материала в контакте. Коэффициент сиг для данного диапазона изменения Q примерно в 2 ... 7 раз меньше ttj. Указанные коэффициенты можно использовать лишь при весьма грубой оценке состояния смазочного материала в контакте, поскольку при получении формул (3.126), (3.127) мы предполагали, что скорости скольжения в контакте достаточно малы и Ао 1. При произвольном Ао аналитическое вычисление интегралов (3.122) с использованием нелинейной зависи-
мости (3.121) касательного напряжения от локальных скорости скольжения и давления невозможно, поэтому учтем указанную зависимость попра-вочньш! коэффициентом. Будем считать, что в формулах (3.120) для касательного напряжения коэффициент А постоянен и равен характерному значению на площадке контакта, вычисляемому по характерному значению Ао. Найдем среднее значение Ду квадрата локальной скорости проскальзывания, причем в формулах (3.118) примем Д= Лч° = cjj - 0:
S О
jdr jr{acosip+ b sinifi) dtp = nab 2s 0 0,
->mn
(a + b) irdr =
Вычислим средние значения 5 + кр и Vm(p Т).
1 , ri 111
-я [S + KPo(l- - ---) ]d%dn = s a b
= 2Jr{b + кро>/ГТ=)dr=2[- + -Po jy/rdr] = 0 2 2 0
= 6 +
l / r, - a Po VI ------
X J/exp G 1
X Jexp
d\dц = xp
-S (Г- 7-.)
dr = Po exp
-s (7-- T-j
Таким образом, характерное значение Ао ш в контакте
-бЧТ^Го)
Лот = - !com lc%(fVJTbX[rexp 4 2kf
X(64i)]
(3,128)
Тогда поправочный коэффициент, учитывающий снижение касательных напряжений вследствие прогрева смазочной пленки,
--=
arshAom
(3.129) 153
Таким образом, выражения для силы и момента принимают вид
F =
-8(Т-То)
а,(ДУ5% + Ду°еч) +
(3.130)
М = -
8А
ехр
+ - (Ду°е5-Ду?е,
причем Дv , Ду° не обязательно равны нулю, Мэфф = м(0,10 /я- эффективная вязкость смазочного материала в контакте при чистом скольжении.
В полученных выражениях учтена лишь часть всей силы и всего момента, действующих на шарик, обусловленная локальным проскальзыванием в контакте. Мы считали, что распределение давления в контакте является эллиптическим. Фактическое давление отличается от контактного давления, определяемого по формуле Герца, вследствие наличия в контакте смазочной пленки переменной толщины. Это приводит к созданию результирующей силы, направленной против направления скорости качения, и момента относительно оси 0%, для определения которых (точнее, силы и момента, действующих на единицу длины) воспользуемся аппроксимационньп^и формулами для указанных величин, полученными численньп^ расчетом зластогидродинамического контакта двух цилиндров радиусами Ri, (рис. 3.20) при чистом качении со скоростью ы.Тогда сила F, и момент М, (относительно начала координат), действующие на единицу длины цилиндра, в режиме обильного смазывания вычисляем по формулам
F.=3.01L1(4)°\)°%
/г, +Л, а £- Л Е'
Т) >
(3.131)
. - М(0, Т)и 0.S4
М. =6,02gj?4 ~1.Л ) (-
где
=,-.4=-(
Е 2
1- V? 1- ul
Ро - максимальное контактное давление. Скорость качения в этих формулах считаем направленной вдоль положительного направления оси О т?. Видно, что момент всегда действует в сторону, npoTHBononoxiyro качению, сила же может оказаться направленной против вектора и, если (Кг - Ri)l(R2 + Rl)
если цилиндр 154
радиусом
< 0. Последнее возможно в двух случаях: 1 внешним образом касается второго ци
Рис 3.20
линдра (именно этот вид касания изображен на рис. 3.20), при этом Ri, R2 > О и Л| > R2, если цилиндр радиусом R2 внутренним образом касается цилиндра радиусом Rl, при этом R2 > О > Л
Предположим теперь, что область контакта, изображенная на рис. 3.20, представляет собой поперечное сечение BbiTHHjrroro эллиптического контакта с большой полуосью а. Предположим также, что скорость и качения на всем контакте постоянна. В сечении плоскостью I = const силу и момент, действующие на единицу длины, вычисляем по формуле (3.131), причем ро (для линейного контакта) следует заменить на Ро V 1 - (S/д) . где ро - максимальное давление в эллиптической области контакта, определяемое по формуле Герца. Величины R2, Ri представляют собой радиусы кривизны контактирующих тел в плоскости OtjJ. Интегрированием силы и момента, вычисляемых по формулам (3.131), ндоль большой оси контактного эллипса, получаем силу Р^. и момент М^., действующие на тело с поперечным радиусом R i:
Fk = 5,53aERkH--- (--:-) (-г) е„;
а EiR
M,n.06-R4,iJf\lLy- [ . (3,32)
Коэффициаи kfj, учитывающий наличие масляного голодания в контакте,
k,=0,14(fl(l-0.26()),
где ho - фактическая толщина пленки в контакте; h - расчетное значение толщины при обильном смазывании.
В контакте шарика с кольцом с высокой точностью можно считать скорость и качения постоянной на всем эллипсе контакта и рассчитывать по формуле (3.16), предполагая кинематику идеальной. Можно использовать формулы
л,--, R2 = -
2 cosa
; л = ( -ь р?
(-l) cosa
подставляя вместо ро максимальное значение давления ро , определяемое по формуле Герца. Таким образом, формулы (3.132) в применении к шариковому подшипнику дают значения силы и момента сопротивления каче-, нию, в первом приближении не зависящие от фактической кинематики шарика. Если обозначить эти величины (коэффициенты в формулах (3.132), стоящие перед векторамиет,и [е^, ej] ) через/ иЛ/;. то результирующая сила и момент, действующие на шарик в контакте с т-м кольцом, определяются соотношениями:
F = - kiгг,srr, [asm ((-1)Avg%е, + Aw%,е,) +
+ cve,] + (-l) F*me.sgn(i72 - П.) ;
(3.133)
Входящая в эти формулы функция sgn(x) - знак числах, т. е. направление действия силы и момента качения, возникающих вследствие несимметричного распределения давления в эластогидродинамическом контакте, зависит от знака Q.2 - fij. Рассмотрим качение шарика (см. рис. 3.17) по желобам колец. Пусть, например, fij > П,. В этом случае шарик катится относительно наружного кольца против часовой стрелки, а относительно внутреннего - по часовой стрелке. Тогда сила треяия качения, действующая на поверхности наружного кольца, направлена против, а действующая на поверхности внутреннего - по вектору е^. Момент на каждом кольце имеет положительную составляющую, направленную вдоль оси Oz подшипника, т. е. вдоль вектора е/. Аналогично и для JiJj < fti. При 0,2 = Q.\ качение отсутствует, а сила и момент равны нулю. Используя выражения (3.133), можно найти момент ЬИ относительно центра шарика [поскольку именно он входит в уравнения (3.111)] :
М = М;;;-(-1) - [e .F;;,] =- imWm X 2 8Aj
(-1) - (д; + 6m ) СО;;, + [ (-1)Дv ;, е, - Av£%e]
-Mkmn{Sl2 - Jl,)e;- (-1)
М(0, Тт)
mSm a.m[(-l) -AVf°m е,+Ду°;,е,] + а.те/ +
+ {-\) Рктщп{0.2 -П,)е/
Используя формулы (3.133), можно вычислить момент сопротивления вращению m-ro кольца. Предположим, что сепаратор базируется относительно колец и моменты трения, действующие на сепаратор со стороны каждого
из колец, равны Afj е^. Тогда можно определить силу F., действующую на шарик со стороны сепаратора. Поскольку сепаратор вращается с постоянной угловой скоростью, то из условия равенства моментов получаем
(М^г + М^г) ег - ZR*F., [Их, е^] = 0.
Если базирование осуществляется относительно, одного из колец,скажем наружного (внутреннего), то М] = О {М1 = 0).
Момент сопротивления вращению т-го кольца обозначим через M(i е^. Очевидно,-(Af/ot + M/ot )ez представляет собой суммарный момент сил относительно оси Oz, действующий на систему сепаратор + шар ига. Но поскольку момент импульса этой системы не меняется, то Л/rot = -rot = = Afjot- Тогда, используя выражения (3.133) для силы и момента (относительно центра контакта), действующих на шарик, можно, просуммировав моменты, действующие на кольцо по всем контактам, а также учтя момент со стороны сепаратора, получить выражение
rot = -Afjr+Zsgn(n2 -ni)(i /*:iCosa + F,/?*) +Z Z* 4 ! X
i*[( c-co?)*+ (co/- cof)]a,i -Rt 2
X (со/ - fil cosa)----1-- (co + 1 sina) sina
При получении этой формулы предполагали, что
Л, -агг X
(3.134)
£ ;, J COSQt
Таким образом, для определения момента сопротивления вращению необходимо рассчитать кинематику шарика, решив систему уравнений
(3.111), (3.112), которая нелинейна по переменным сос, U п- Действительно, в левую часть уравнений этой системы входят произведения переменных. Кроме того, в правых частях (3.111) имеются коэффициенты 1 от. учитывающие температурные эффекты в смазочной пленке и вычисляемые для каждого кольца по формулам (3.128), (3.129), причем в последнюю входит неизвестная величина Штп I - абсолютное значение составляющей угловой скорости, перпендикулярной области контакта щарика с т-ы кольцом. Таким образом, в общем случае систему уравнений кинематики следует решать численно.
Для проведения аналитического исследования сделаем дополнительные предположения: пренебрежем величинами порядка - со J /со? и. со/ -- ayji/co* , при вьиислении коэффициентов к^ примем со = --nilsina/2.
Первое предположение не вызывает сомнений в своей справедливости для большинства подшипникой, работающих в нормальных условиях. Для приборных подшипников отличие cOg от со*, по-видимому, не превышает 1 %, Второе предположение означает, что абсолютное значение составляющей угловой скорости, перпендикулярной области контакта колец, равное I (2 - J2i) sinal, распределено поровну между областями контакта с наружным и внутренним кольидми. Это предположение несет в себе определенную погрешность, однако позволяет априори, не решая задачу, оценить значение коэффициентов Rim-
Введем обозначения:
~ м(0,Г^) от ~ -:-~1отот >
Vm = (сос - соЭЛ*- (-1) .(со, - со?) ; Fgm = Km arm (w* - ncosa) ;
Мк =M!ci +Mki+(Pki +Fk2);
Иэ%ф=И(0,Тт)к1т<т.
(3.135)
Величина Мэфф играет роль эффективной вязкости смазочного материала при скольжении с учетом тепловых эффектов.
Систему уравнений (3.111), (3.112) можно записать в виде
S (-1) Km asm Vm=Mksgn(n2 - П.) -Fg, - Fg -
OT= 1,2
2/cj*siha.
Io}*ojjCosa - co S
ormiam-b) =
m=l,2
= 2 -m= I, 2
S Kmi -) asm + /co*co cosa = -/cojcofsina; m= 1,2 2
~ гот , От
sot = s n(l--(-r) asm .
4 sm P?
Из последних двух уравнений находим
со,= [( 2
-( 2
от= 1, 2 8
°гт {am * bm) sina)/co?cosa -
OT= 1. 2
arm Ы + йот^)) /cojco/sina] jA=
co = -
(3.137)
(3.138) (3.139)
/cjj sina Кт -
0 ( 2-fl.) S -arm{ab;h)RlA; (3.140) P7 m= 1,2 8
OT=1,2 8
arm ( ? + b) Sim sina] 2 Km(- Уат + OT=1,2 2
+ / co**co*sinacosa -/A, где t=Rt; RiR*- fm
(3.141)
: Л' = [2 -armiar+br)] 2 Km{ - Уam + (lotcosay. I OT=i,2 8 OT=1.2 2
2 Km a,mVm=F.,+ (Fk2 -F) sgniSl - П^) + Fg - Fg; (,Ъ.\Ъ6) m = i,2
Использовав найденное значение со из двух первых уравнений определим Vm:
2/u)* sina
(3.142)
= -[Fc + iFk2 -Fki + -i-Mfc) sgn(Sl2 - гг,) -
22 i, P°,
2/wSsina 2Fj---to].
По известным Vi, из формул (3.135) находим Wc - Wc = -; w/ - w/ = - .
2R p
Теперь можно записать выражение для момента сопротивления враще-
Mrot = -Mir + Zsgn(n2 - n,) (A/j cosa + FkiR) -ZRFg +
ZRT 2 ~
+ -- [cr + (/*2 -it, - -Mk) sgn(n2 - no +
+ - /w*sinaw + 2f>i ] -Ai -(a? + 6?) sina(w + П, sina) = * 8
= Mi +Л/2 +Л/з +Л/4,
(3.143)
где
1--г-::-:-, =-Z--- sgn(n2 - П,);
Rr*R* 8
51п^а(П2 -i) Ц1ыУ - cosa-
- -а.2( 1+&1) 2 m(-)4;;,]M; 8 т=1,2 2
(3.144)
Р' т=1,2 8
Слагаемое обусловлено силами базирования, Mj - моментами качения шарика по дорожкам, вызванными несимметричностью распределения данления в контактах, обусловлено составляющей co угловой скорости шарика, Мц - составляющей со. Если момент инерции шарика пренебрежимо мал (как, например, в приборных подшипниках), то слагаемым Мц можно пренебречь, а слагаемое Мз при 1=0 принимает более простой вид
Мз = г(П2 -ni)sina[ Б
= 1,2 °гт (От + т)
Слагаемые М2, М^, Мц можно рассчитать по формулам (3.144), момент же Ml, обусловленный силами базирования, возникающими в области контакта сепаратор - кольцо, оценить сложнее. Характер и значение зтих сил определяющим образом зависят от количества смазочного материала и режима движения сепаратора. Обычно при расчете кинематики шариков и момента сопротивления вращению предполагают, что сепаратор занимает центральное положение, а момент сил базирования вычисляют по формуле 11,11. Петрова
2niiR\b. Msf- =--{Пт-<с),
а
где Rs - радиус базы сепаратора; fej - ширина базового пояска; Д - радиальный зазор базирования; ц. - вязкость смазочного материала.
Однако допущение о центральном положении сепаратора часто оказывается неверным, поскольку такое положение неустойчиво и сепаратор совершает сложное движение под действием сил со стороны шариков. Следовательно, априори, не решая задачи о движении сепаратора, невозможно оценить момент базирования. Иногда значение Л/i можно определить экспериментально. Представим весь момент сопротивления в виде суммы
Mrot(Z) =М,+ZMft, (3.145)
где Мь - момент, обусловленный движением одного шарика. Тогда для комплекта без одного шарика получим
rot(-l) =Mi +(Z-\)Mb.
Умножив соотношение (3.145) naZ - 1 и вычтя из него выражение для Mjot(Z- 1), умноженное на Z, имеем
Ml =ZMrot(Z - 1) - (Z - l)Mrot(Z),
(3,146)
Наглядный геометрический смысл формулы (3,146) состоите следующем. Измеряем два значения момента сопротивления при двух значениях
1 ...
5 6 7 [
8 ]
9 10 11 ...
14
