Главная страница сайта
Российские промышленные издания (узловые агрегаты)
1 ...
4 5 6 [
7 ]
8 9 10 ...
14 -(-l) sma*Z>(,2)(4 + m)]
(3.62)
Из полученных выражений следует, что зависит только от гармоник отклонений формы и размеров колец, номера которых кратны числу Z шариков в комплекте. Эти гармоники влияют также на относительное осевое смещение колец [см. (3.55) ]. Так, например, если число шариков в комплекте Z = 7, то в формулы входят только гармоники с номерами .... -14, -7. О, 7, 14, ... и т. д. На радиальные смещения колец оказывают влияние Dx, Dy и, как следует из полученных для них выражений, лишь те гармоники отклонений геометрических параметров колец, которые имеют номера rZ - 1. Например, для подшипника с числом шариков Z = = 7 номера этих гармоник равны .... -13, -6, 1, 8, 15,... и т. д. На смещение колец влияет также разноразмерность шариков в комплекте. Так, если кольца подшипника идеальны, то смещения, обусловленные только разно-размерностью, равны
Ьу = -
Zcosa* 2
Zcosa* 1
Zsina*
2 p /=1
в формулы для Dx, Dy, входят не отдельные амплитуды отклонений m-ro кольца, а их линейные комбинации с коэффициентами, завися-ugiMH от угла контакта. Если ввести обобщенные амплитуды отклонений кт> Bkm° кольца по формулам
km Вкт
= (cosa* - 1)
+ (-l) cosa*
к (2+m)
- (-l) sma*
\ (4 + w)
(3.63)
TO формулы примут вид
- Z z
Dx= 2 pli <x)b4)j + - 2 2 f=l 2 t=-°° m=l,2
-fZ(po](fZ-i)m -sin[(-07m -VolCrZ-Dm
cos[(/Z-l)T -
(3.64)
D= I psinv* + 4- 2 2 (-cos[(rZ-
-\)Ут- tZ<p] (fZ- 1)m - Sin [(rZ - 1)y --tZ>po]Af2:-i)m
- Po)](rZ)m - sin [tZ(Ут-о)]В^tz),
(3.65)
(3.66)
Обобщим методы и формулы статического расчета одного подшипника применительно к узлу, состоящему из Af подшипников.
Предположим, что ось симметрии узла с номинальной (идеальной) геометрией в начальном состоянии совпадает с осью ротора. Введем систему координат, связанную со статором, и систему О', связанную с ротором (Oz и Of - оси симметрии колец, закрепленных соответственно на статоре и на роторе). Пусть в начальном состоянии системы координат совпадают. На ротор действуют внешние силы F, Fy, F и моменты М^, My. Эти факторы вызывают перекосы и смещения системы координат ротора, которые, как и ранее, будем характеризовать тремя углами а, j3, у и координатами Хо, Уо, Zo точки О' в неподвижной системе статора. Зададим геометрию каждого подшипника в начальный момент в неподвижной системе координат. Обозначим вектор номинальной геометрии п-то подшипника черезр = \рГ, pV, рГ, pS , рГ, Р% , рГ ] Пусть т„ -номер того кольца п^о подшипника, которое крепится-к ротору, тогда
п~ п~(~0 т номер кольца, закрепленного на статоре. Вследствие нагружения произойдет перекос т„-го кольца в п-м подшипнике, а кольцо т„ останется нeпoдвижньпvl, причем углы перекоса и смещения w-ro подшипника будут одинаковы для всех подшипников и равны а, j3, у, Хо,
Ранее получено выражение (3.39) для потенциальной энергии одного подшипника. Энергия для всего ja получается суммированием значений потенциальной энергии отдельных подшипников, т. е.
м
П= 2 П„.
а для П„ следует использовать выражение (3.39), в котором величины А^о, S*, Z, а*, V*, Z*, R*, I имеют индекс п, а величина равна разности лг-координат внутреннего и наружного колец (S -х^о -ю); аналогичные соотношения имеют место и для Ьу, б^, б^, б^. Когда в w-м подшипнике ротор перекошен, а статор неподвижен (т. е. w -e кольцо перекошено, а от -€ неподвижно), то ocjo = 0,XiQ= Хо, если внутреннее кольцо крепится к статору, и = 0,х:2о = о. если к статору крепится наружное кольцо. Таким образом.
S2 = (-l)%o, 5 , = (-i) Vo;
S, = (- = (- !) , = (- l) * /3;
Ti = T.T2 = 0, еслиm = l; Ti =0, T2 =y, если m =2.
Выражение для Ущ можно записать в короткой форме: = У^, где символ Кронекера 8=1 при / = / и S- = О при / Ф /. Потенциальная
энергия узла
5 п= 1
Z J z -1- sina* +
2 s*
8S* v*
+ (/г* )2] (o
5Z , 3v*n
+ jg)cosa* -2/ Ooa-xoj3)cosa* + 2zSsina* + Уравнения равновесия узла будзпг иметь вид
(3.67)
| | | | | Кхр | | | | | |
| | | | | | | | | |
| | | | | | | | | 2 (-l) i* Z sina* |
| ~Кхр | | а | | | а | | | |
| | | | | | | | | | |
(3.68)
где Р* = К% (S* ) - нагрузка в контактах w-ro подшипника; коэффициенты матрицы представляют собой жесткости узла:
X (1+tg a* )cosa* ;
п-1 48* Sv*
i:,;= 2 (1+ l£ ctg a*h)sina* ;
п=1 28* 3v*
М %р*П7П 28*п , ,
.Ь^-г;;г*п/ ) (3.69)
п=1 48*4 Эу*
;= 2 [/ cosa* + 4 sina* (z*sina* -/?* cosa*)] .
n=l 46*
3v*
Рис. 3.9



Для узлов, способных поддерживать состояние предварительного натяга без приложения внешней осевой силы F, = О является положением равновесия, и, как следует из третьего уравнения системы (3.68), зто возможно лишь при
2 (- l) i Z sina* = О,
т. е. если сумма осевых сил, действующих на ротор со стороны всех подшипников в состоянии предварительного натяга, равна нулю.
На рис. 3.9 приведена конструкция узла, у которого полюсы отдельных подшипников совпадают (D - полюс узла).
Рассмотрим узел, состоящий из двух подшипников с одинаковой номинальной геометрией и не имеющий полюса, для которого верны следующие соотношения:
R* =R*2=R*. 2*2= z* =z*; а*=-а*=а*;
[/*! = = *. (3.70)
nti = ш2 = тп .
в отличие от формулы (3.33), здесь /1, /2 относятся к разным подшипникам. Индекс п = 1 относится к левому подшипнику, а w = 2 - к правому. Узел с m = 2 изображен на рис. 1.13. Последние два соотношения (3.70) означают, что на роторе крепят либо оба внутренних, либо оба наружных кольца. Жесткости такого узла вычисляем по формулам:
3P*Z .. 28* , 2 *
Кг =-(1 +-tga*)cosa*;
3V 28*
К, = (1 + ctg a*)sina*;
(3.71)
а- - (l+4tg0)/
Кхр = 0.
Перейдем к исследованию статики узла с учетом отклонений формы и размеров. При получении формул (3.70) для жесткостей узла предполагали, что существует система координат, связанная со статором, в которой кольца в начальный момент представляют собой идеальные торы, а ось Oz является их осью симметрии. Однако это предположение выполняется далеко не всегда. В действительности следует учитывать, что кольца в результате их посадки в статор и ротор имеют определенные перекосы и смещения. Будем считать, что эти погрешности, обусловленные посадкой, малы. Покажем, что их можно рассматривать как погрешности изготовления в системе, связанной с ротором или статором - в зависимости от того, где они крепятся.
Исследуем выражение для упругого сближения S из (3.33). При его получении исходили из того, что есть неподвижная система координат К = Oxyz и связанная с кольцом система К' = 0%г^, в координатах которой выражены отклонения формы и размеров кольца. Предположим теперь, что в системе fC кольцо имеет перекосы, обусловленные посадкой.
Это означает, что существует система .А^ = 0 г\, в которой эти перекосы и смещения равны нулю и в которой измерены отклонения вследствие погрешностей изготовления кольца. Координаты в системах К. и К' связаны соотношениями
= 5(а,)3,т)
(3.72)
где 0 - углы перекоса; У- угол поворота кольца при посадке; ri f- смещения при посадке (координаты точки О в системе К'). Напомним, что /3, - а, 1 - составляющие единичного вектора вдоль оси в системе К', а cosy, - siny - составляющие единичного вектора вдоль оси на плоскость 0ц% системы К'. Таким образом, 7 - угол поворота кольца при посадке, отсчитываемый против часовой стрелки, если смотреть с конца направляющего вектора оси Значения а,%Х, Я, Г малы вследствие малости смещений при посадке. Используя формулы (3.20) и (3.72), получим связь координат в системах КлК :
где
+ S(a,/3,T)
(3.73)
- транспонированная матрица S. Поскольку углы ot, /3, а, (Гмалы, то с квадратичной по этим углам точностью
c0s7 sm7
S(,a,0,j)= -sm7C0S7 -f(7) . (3.74)
P -a 1
где Ни) Л (у) вычисляем по формулам (3.28).
Для произведения матриц, входящего в вьфажение (3.73), с такой же точностью имеем
cos(7 + 7) sm(7 + 7) -?(7 + т) -яп(у + у) cos(7 + r) -f(7 + 7) К -а 1
= S(a, р,у + у).
(3.75)
где
Р = 0 + cosy + awiy, а = а + асо87-smy, Й7 + 7) =5(7 + 7)1 Л(7 + 7) = Г(7 + 7)1
Для величин Хо, Уо, Zq квадратичной погрешностью получаем выражение
Xq +cos7 - rTsiny Уо +sin7 + i7cos7 zo-f
(3.76)
Таким образом, связь координат в системах iC и К имеет вид
X - Хо
= S(a, /3,7 + 7)
Z -Zc
(3.77)
т. е. аналогична связи (3.20) координат в системах К к К.
Пусть теперь отклонения формы и размеров рабочих поверхностей колец измерены в цилиндрической системе, связанной с системой К . Обозначим соответствующие отклонения через Ц-. Тогда, исходя из уравнения (3.77), получим вьфажение для упругого сближения 5, аналогичное (3.33), но в котором 0, РтЪп тоХто'Уто,Р}0= I, 6) заменены соответственно на От, Г„ = 7 + Гт, то, о Уто' Р}0 = 1. 6), а именно:
5 = 5*+ 5; S*=p?-p?-p2+v*;
5 = 2 (-1) () cosa* - imosina* + lm Ш + m = 1, 2
+ Р'(а*,РЛ1Л2);
(a*. , Ti, T2) = P7 + 2 [(cosa* - 1)?;, (v? -Гт) + m= 1, 2
+ (- 1) P2 +m - Tm) cosa* - (- 1) - Tm) ina*] ; i7(() =v(>fi)\
Подставив вьфажения (3.75) для a, и (3.76) для JCq.Jo. z o в формулу для S, получим
5 = 2 (- О [v ()cosa* - zosina* + ()] + m=l,2
+ P(a*, , 71.72) + 2 (- 1){ [TmCos( - T ) + wi = 1, 2
+ T? Sin ( - ) ] cosa* + f sina* + / [cos( - -y) --asin(-T)]
(3.78)
Поскольку значения S, определяемые формулами (3.78) и (3.33), должны совпадать (действительно, упругое сближение не зависит от того, в какой системе координат - в К* или К мы задаем геометрию кольца), то, сравнив указанные формулы, видим, что отклонения геометрических параметров в системах К' и К' связаны соотношением
р; + 2 [(cosa*-l)p; (-7m)+(-l)V2+m(-wi = 1, 2
т
- 7 ) cosa*-(-1) р;+; (-7; ) sina*] - 2 (- 1)
m= 1, 2
X ( [TmCos(ip - 7m) + Vmifi Ут) ] cosa* +fmSina* +
+ (z*cosa*+/?*sina*) lm<M>P-7m) - a;;,sin(vJ - r)] =
= p7+ 2 [(cosa*-l)p; (-7m) + (-l) P2+, (-m= 1,2
-7m)cosa* - (- l) p;+ (-7)sina*].
(3.79)
Здесь использована формула / = z*cosa* + R*wm*. Поскольку в окончательное выражение, связывающее отклонения в двух системах координат, не должен входить угол контакта а*, то из формулы (3.79) находим
Р'т(-7т)Рт(Ф);
Р; +т (¥> - 7т) = Р'л +т () + Тт *R*i?mCOS,fi - а„sin) ;
Р 2 +т (.Р - 7т) = Р'2 +т (<Р) (Хт + *?т) со +
+ (z*am-frm)sin. (3.80)
Таким образом, наличие перекосов и смещений при посадке m-ro кольца (е^, З^п 7> 1т> Тт Гт) эквивалентно появлению дополнительных слагаемых в выражениях для отклонений, обусловленных изготовлением.
Предположим вначале, что угол поворота кольца при посадке равен нулю (ущ = 0). Тогда осевое смещение при посадке эквивалентно изменению осевого положения центра кривизны желоба, а наличие радиальных смещений и перекосы при посадке эквивалентны появлению дополнительных выражений для отклонений в составляющих Р2 + т' Р^+т вектора геометрии, причем гармоники этих отклонений являются гармониками первого порядка. Наличие же угла поворота при посадке равносильно тому, что происходит поворот кольца с суммарными отклонениями (включая смещения при посадке) на угол ут С учетом формулы (3.2) для коэффициентов разложения отклонений в ряд Фурье получим следующие соотношения:
0.50 (4+т) =0,5ао{4+т) + т' 1 (4+т) =1 (4+/П) +R*?m
(4+m) =(4+m) (3-81)
(2+m) - i (2+m) ~Xm ~ Z*m bi (2 +m) = *i (2 +m) - T?m + 2* m
Здесь величины с чертой относятся к системе К'. Из этих формул следует, что если значения До (4 + т). (4+т) > *i (4+т).i (2+ 2 1 (2+/ ) отличны от нуля, то соответствующие амплитуды ртклонении геометрических параметров в системе К', связанной с ротором, можно сделать равными нулю надлежащим выбором смещений при посадке. Практическое же достижение этого результата - сложная технологическая задача.
Пусть теперь известны погрешности pj изготовления всех колец ротора (статора) в системе, связанной с ротором (статором). Эти отклонения можно либо измерить в узле в собранном состоянии (отдельно для колец статора и колец ротора), либо, зная смещения при посадке каждого из колец, рассчитать по формулам (3.80), (3.81). Выражение потенциальной
энергии всего узла nonjacM суммированием энергий отдельных подшипников, т. е. выражений (3.52) :
м
П= Б
+ 2 [Р'( * ,;,7?,7?)] -/Z (-l) %sma* +
48* /=1
+ (-1)
25*
[xocosa* + l p]L + (-1)
26 *
- т„ ЗР - ЗР*п
- / а] D y - (- 1) 4 ZoZ)sina* + Z (дгосова* +
2s*n
3P*n
Z (yocosa* -1 аУ +
88 *
Z zSsina*
(3.82)
86* 48*4
Значения D , Dy, D дня и-го подшипника вычисляем по формуле (3.53). Кроме того.
(3.83)
где ip о - угол поворота комплекта шариков в w-m подшипнике.
Использовав выражение (3.82), запишем уравнения равновесия ротора на подшипниках с учетом отклонений формы и размеров при изготовлении:
к
-Кхр О
м
Х (-1) P* Z sma* л= 1
Уо Ч а
+ 2 (-1) il-
11=1 28*
-Djcosa* -coso*
Входящие в эти уравнения жесткости вычисляем по формулам (3.69), причем вторыми слагаемыми в правых частях (т. е. величинами, пропорциональными S *n/v* ) следует пренебречь. Для ротора на одинаковых шариковых подшипниках уравнения равновесия можно записать в более простой форме:
+ (-1)
- ф\ + Dl) cosa*
- ф^у +Dpcosa* (D-5*)sina* Ф1-Б'у)1
-Ф1-о\)1
(3.85)
3.3. УЧЕТ УПРУГОСТИ ВАЛА ПРИ РАСЧЕТЕ ОСЕВОЙ И РАДИАЛЬНОЙ ЖЕСТКОСТЕЙ РОТОРА НА ДВУХ ШАРИКОВЫХ ПОДШИПНИКАХ
При наличии инерционной нагрузки происходит перемещение центра масс ротора, на которое влияют не только жесткости опор, но и деформируемость всего ротора. В связи с этим рассмотрим две задачи о перемещении центра масс ротора под действием осевой и радиальной перегрузок. Геометрия узла схематически представлена на рис. 3.10. Предположим, что до приложения нагрузки центр масс совпадает с центром симметрии ротора. Пусть опоры одинаковы [см. (3.70) ] и имеют осевую, радиальную, угловую жесткости Q, С^, и перекрестные жесткости (- 1) **С^. Предположим, что маховик имеет массу М и площадь поперечного сечения, значительно превышающие массу и аналогичную площадь остальной части ротора. Это допущение позволяет свести распределенные инерционные нагрузки в точку О - центр маховика и рассматривать задачу об упругой деформации вала под действием такой сосредоточенной силы.
Пусть осевая перегрузка равна Iv. Тогда сила =MWz, приложенная в точке О, вызовет осевые перемещения точек ротора. Обозначим /(z) конечное положение точки с начальной координатой z. Тогда перемещение точки равно /(z) - z. В левой и правой опорах возникнут силы реакции 21 hF 2, причем
F = ±F*-Czl/-(-0,50 +0,5/];
F22=+Fi- Сг [/ (OiS/) - 0,5/], (3.86)
где F* - усилие осевого натяга. Верхний знак в этих формулах берется в том случае, если смещение ротора в положительном направлении оси Oz вызывает уменьшение осевого усилия в левой опоре (и = 1) и увеличение в правой ( = 2); в противном случае берется нижний знак. Если воспользоваться введенными ранее обозначениями, то этот знак такой же,
как и знак числа - sgn (sina*)(-!) [ sgn(x) - знак числа х] . Запишем условие равновесия
+ г2+г=0. (3.87)
Отрезок dz после деформирования будет иметь длину df, а относитель-
df - dz df
ное удлинение df
- 1. По закону Гука, напряжение в точке z
(3.88)
где Е - модуль упругости материала вала.
На каждом из участков [- 0,5/], [0,5/] значение (t5(z) (5(z) - площадь поперечного сечения) должно быть постоянным и равным - Fi на левом участке и - на правом. Таким образом, имеем соотношение
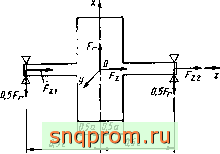
Рис. 3.10
Рис. 3.11
dfjdz = 1 + Fz (- 1) 7 [FS(z)], справедливое при я = 1 для левого участка, при и = 2 - для правого.
Проинтегрировав эти уравнения, находим
-dz+/(0), -0,5/<z<0; (3.89)
rfz+/(0), 0<z<0,5/.
Использовав данные формулы и соотношения (3.86), получим F = [±P-C/(0)]/[l + T];
Fz,= \-F*- cjmi [1+4- Т
Из условия равновесия (3.87) находим связь между Fz h/(o) :
Следовательно, осевая жесткость узла
Пусть S{z) = S- const на части вала [0,5д, 0,5/]. Тогда K,2[llC,+ g-a)l(2SE)]
1 -1
(3.90)
(3.91)
Вычислим значение величины С^О - a)l(2ES), определяющей относительную поправку к жесткости опоры, обусловленную упругостью вала. Параметры приборного узла: Q = 2-10 Н/м, (/ - а)/2 = 2 см, Е = 212 ГПа, сечение вала - кольцо с
внешним радиусом 4 мм и внутренним 2 мм. Площадь поперечного сечения S = = я[(410-) - (210-)Т= 3,77 10-* м'; относительное значение поправки Сг(1-а)
2 10 2 10-=
= 5 10-=
3,77 10-* 2,12 10
Следовательно, неучет упругости вала приводит к погрешности при определении жесткости, равной 5 %.
Пусть радиальная перегрузка равна W. Тогда сила, приложенная в точке О, = MW. Рассмотрим рото£ как упругую балку известного поперечного сечения. Предположим, что ш„ = 2 ( = 1, 2), т. е. на роторе закреплены внутренние кольца. Маховик вследствие большой площади поперечного сечения считаем абсолютно жестким, а части ротора, лежащие на отрезках [-0,5/, -0,5д] и [а/2, 0,51] (см. рис. 3.10), - заделанными в точках Z = ± 0,5 а. Введем систему координат, как показано на рис. 3.11, сдвинув начало в центр левой опоры. Под действием радиальной силы ротор получит в точке с координатой z прогиб /(z). В опорах возникнут силы реакции, равные 0,5F, и моменты Af. Рассмотрим левую часть балки. Со стороны отброшенной части действуют момент т и сила 0,5F. Уравнение равновесия моментов относительно опоры имеет вид
Af+m - 0,25F (/ - а) = 0. (3.92)
Запишем уравнение изогнутой оси балки df Q,2SF(l-a) -т'-Q,SFi
где / - момент инерции сечения. Проинтегрировав это уравнение, с учетом lz = 0,5 (?-в) - О (поскольку крепление жесткое) получим
1 Рг , а-а)
-z)-i- (l-a) -т')(
1-а
При Z = О угол /3 перекоса колец в левом подшипнике 1
1-Тб----
(3.94) (3.95)
Воспользовавшись первым и последним уравнениями (3.40) равновесия подшипника, при б^ = /(0), 8 = 0, My = М , F = 0,5;, w = 2 получаем
С/(0) +C3/3 = 0,5F,;
V(0) +с,/з=м'.
(3.96)
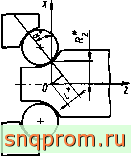
Рассмотрим отдельно левую опору (рис. 3.12). Центр опоры (точка О) находится на линии пересечения оси Oz и плоскости, проходящей через
Рис. 3.12
точки касания шариков с внутренним кольцом. Для вычисления жесткостей, входящих в уравнения (3.95), воспользуемся формулами
48* 3P*Z
/♦соSO*,
полученными из общих выражений (3.41) после отбрасывания вследствие малости величин порядка 6*/v*. Для опоры, изображенной на рис. 3.12, угол контакта таков, что sina* > О и z* = - 0,5p?sina*. Следовательно, /* = z*cosa* + i?*sina* = (R* - O.Sp,cosa*) sina* = Rano, где R - радиус окружности, проходящей через точки касания шариков с внутренним кольцом.
Умножив первое уравнение системы (3.96) на - /*/cosa* и сложив со вторым, получим
.!!!L + л/- = 0; С,/(0) + СхрР = (3.97)
2cosa* 2
Решив уравнения (3.92), (3.95), (3.97), получим следующие формулы:
m = -f(l-a)-
2cosa*
4 Jl!
Я0) =
(xp ,a-a) a)tgg*
1-- f
1
(3.98)
Проинтегрировав уравнение (3.94) с использованием (3.98), получим смещение центра ротора
(3.99)
2Cr BEJ AEJ SEJ
Определим сумму трех последних слагаемых для ротора, если: Q = 2 10 Н/м:
/ - в - 4 см; £ - 212 ГПа; R*=4 мм; а* = 30°; сечение вала - кольцо с внешним радиусом rg = 4 мм и внутренним г/ - 2 мм:
. = - C-f) = ((4 10)*-(2 10) ]=1,88- 10- м ; (/-а) (4 10)
48£7 48 39,86 ~ *
(/ -a)tga* (4- 10)40,S77)M 10
4£/ 4 -39.86
Я*0-а)Ч&х* 4. 10- (410-=) 0.577
8 39.86
= 1.34
1,16 10- м/Н.
. Ч^ последних слагаемых в формуле (3.99) равна 3,35 -10- + 1,34 X
X10- - 1.16 10- = 2,32 10 м/Н. что в 2.5-10- /(2,32-10- ) = 1,08 раза меныде по сравнению с первым слагаемым. Таким образом, жесткость вала при изгибе может быгь сравнимой с радиальной жесткостыо опор. Следователы10, при конструировании равножестких опор следует учитьшать жесткость при изгибе.
3.4. РАСЧЕТ ПАРАМЕТРОВ КОНТАКТА ТОРЦА РОЛИКА С БОРТИКОМ КОЛЬЦА
При конструировании цилиндрических роликовых подшипников, работающих при комбинированном (радиальном и осевом) нагружении, 1 возникает проблема восприятия осевой нагрузки. Если сделать торец и бортик плоскими, то при отсутствии перекосов контакт будет представлять собой область ЛЯСО (рис. 3.13). При равномерном распределении контактного давления максимальное давление совпало бы со средним
I P = FJS,
где - осевая сила, действующая на ролик; S - площадь области ABCDE. Однако в действительности давление распределено неравномерно, с локальными максимумами у границ луночки, а при малейшем перекосе область контакта превращается в точку (в одну т А, В, С, D, Е), и максимальное давление становится недопустимо большим. При этом в малой области контакта, расположенной вблизи одной из указанных точек (как правило, В или D), возникают пластические деформации, край ролика режет кромку бортика, что приводит к исчезновению смазочного слоя. В результате происходит интенсивное изнашивание рабочих поверхностей торца и бортика.
Чтобы избежать этих нежелательных явлений и уменьшить давление в контакте, торец ролика делают сферическим, радиусом/?о (рис. 3.14, д), а бортик - наклонным с некоторым углом S отвала. Радиус торца и угол отвала должны быть такими, чтобы область контакта не выходила за контур ABCDE. Размеры области контакта будем рассчитывать по теории Герца (см. подразд. 2.1), предполагая с некоторой погрешностью, что при нахождении упругих перемещений бортик и ролик вблизи контакта можно считать полупространствами. Более того, так как кривизна торца во много раз больше кривизны бортика, область контакта будем считать кругом, радиус которого, в соответствии с формулой (2.17),
Го = V3F;o/(2F), (3.100)
где F* = F/(l - ) - приведенный модуль упругости материала ролика и бортика; v - коэффициент Пуассона.
Если ролик расположен без перекосов относительно кольца (для определенности внутреннего), то координаты центра круга контакта х = О, У =Уо (см. рис. 3.13). Пренебрежем незначительными по сравнению с вы-
Рис. 3.13
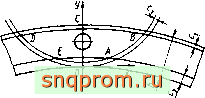
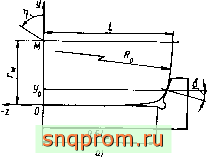
Рис. 3.14
сотой h бортика размерами фасок с, на бортике и Сз на ролике, а также расстоянием от верхней кромки канавки для выхода шлифовального круга до поверхности дорожки качения. Тогда с учетом 2го = й получаем формулу для расчета радиуса торца:
Ro = Ehlillfa)- (3.101)
Учет перекосов и фасок приводит к существенному уменьшению R. Введем углы перекоса ролика и г? (рыскание и крен) в плоскостях Oxz и Oyz соответственно. При повороте ролика вокруг точки М (см. рис. 3.14, а) в положительном направлении (против часовой стрелки) на угол т? центр сферической поверхности торца переместится вниз приблизительно на 770 iRo L - половины длины ролика). Тогда смещение центра круга контакта
(3.102)
При повороте ролика в положительном направлении на угол (рис. 3.14, б) произвольно взятая точка с абсциссой х переместится влево на %х. После перемещения зтой точки в направлении Oz на расстояние
х^(2Ко)+Дг = 1, (3.103)
(Д^ - половина зазора по оси Oz) ролик упирается в бортик. При вьюоде уравнения (3.103) полагали, что радиусы сечений сферы параллельными плоскостями, проходящими через центры сферы и круга контакта, близки по значению. При L < R х ! Подставив х в (3.103), получаем формулы для максимально возможного угла рыскания
lmax=V2Vo и для максимального смещения точки контакта по Ох
(3.104)
(3.105)
Угол отвала конического бортика (см. рис. 3.14, а) определяем по формуле
8=(r-yo)/Ro. (3.106)
Выбор параметров торцового контакта и формы ролика. Изложим метод В.П. Ковалева выбора радиуса i?o торца и угла S отвала бортика на примере вагонного подшипника 42726 модифицированной конструкции ВЗИИТ, предназначенного в основном для установки в вагонные буксы. Конструктивные, технологические и режимные параметры подшипника: радиус дорожки внутреннего кольца = 79 мм, высота бортика h = = 7,5 мм, Cl = 0,7мм,С2 = 1,5 мм,Сз =0,FJ = 2 кН, = 0,3, = 210 ГПа,
= 16 мм.
Рассмотрим два варианта контакта, отличающиеся зазором между бортиком и роликом по оси Oz : lA = 70 и 150 мкм.
При отсутствии перекосов точку контакта надо поместить на оси Оу посредине между точками О vi С (см. рис. 3.13). Тогда/?о найдем по формуле (3.101), в которую вместо h следует подставить эффективную высоту бортика Лдфф = h - Ci - = 5,3 мм; получаем Ro = 1,42 м.
Пусть теперь угол г? перекоса, измеряемый в радианах, изменяется от - 2,2 Ю * до 2,2 10 *. На рис. 3.15 заштрихована область, внутрь которой не должен заходить круг контакта. Определив по формуле (3.105) при lA =150 мкм Д; = 14,6 мм, убеждаемся, что точка контакта выходит за пределы незаштрихованной области. Следовательно, значение/?о = 1,42 м слиипсом велико, так как приводит к краевому контакту. Используем метод последовательных приближений. Положимте = эфф/ = 4,05 мм, Ло = 400 мм. Тогда по формуле (3.102) Д^, =88 мкм, а по формуле (3.105) при 2Д2 = 150 мм Д^ = 7,75 мм. Построим (см. рис. 3.15) прямоугольник, ограниченный прямыми х = О, х = Д^, / = /о -\\\ =Уо + + \Ау\. Проведем две окружности одинакового максимально возможного радиуса с центрами в правых вершинах прямоугольника. Нижняя окружность радиуса Го = 1,7 мм касается нижней границь!, в то время как расстояние от верхней окружности до верхней границы достаточно велико. Поэтому целесообразно увеличить о и /?о, взяв, например, у о = 4,5, Ro = = 450 мм. Тогда Д^ = 0,1 мм, А^ = 8,2 мм. Построив соответствующий прямоугольник, видим, что Го = 1,8 мм. Из формулы (3.101) получаем
Рис 3.15 О

8 W Х,мм
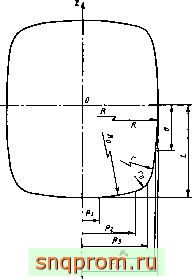
Рис 3.16
Ro = 2£ rg/(3fj) = 448 мм, что мало отличается от ранее выбранного значения Rq. На этом процедуру подбора Ro заканчиваем. Угол отвала бортика находим по формуле (3.106) : 5 = 0,0256 1°28.
Рациональное профилирование ролика. Пусть эффективная длина дорожки (см. рис. 3.14, а) lg = 49 мм (длина ролика 52 мм, по 1,5 мм занимает каждая канавка для выхода шлифовального круга). Тогда методом, изложенным в подразд. 2.2, выберем оптимальные параметры двухрадиусного меридиана - большой радиус R, малый радиус г и координату а точки сопряжения дуг. При радиальной нагрузке на ролик f; = 15 кН и тг1 < 2,2 10 радиус /? = 60 м, г = 300 мм, д = = 21 мм. Используя параметры торца и меридиана, можно указать рациональную форму ролика (рис. 3.16) (разработка е.м. Филатовой), сечение которого плоскостью, проходящей через ось, представляет собой кривую, составленную из сопряженных дуг окружностей четырех различных радиусов R, г. Го, Ro и двух отрезков прямых. На торцах ролика имеются две плоские круговые области радиуса pi; фаска радиуса Го может быть технологической. Для изготовления ролика необходимо дать количественное описание поверхности. Введем функцию
1,х>0,
О, х<0.
Тогда в цилиндрической системе координат Optpz уравнение поверхности ролика примет вид
\z\=L-e(fi2 -р)в(р-рО{уМ-Ф1-р^)-в{рг--р)в(р-Рг)-
Rl-p\ - Vr + ГоVI - iPilRo) -
-fl(p4 -р)в(р-
- [Р-Р2 (1 -ro/Ro)V
- Рз) \\/2R (r - P4) [- 1 + r/R -y/(r/R) +r(p\
-p)f[R(r - P4)]] + l}-0(p-P4) [L-s/2Rir-p)], (3.107)
j \ me Q<P<r; Pi,L,Ro,r,R,r,p4 заданы; Рз выбираем для обеспечения требуемого радиуса фаски, аго и р2 определяем из условий сопряжения фаски с окружностью радиуса Л о:
Рг = [Рз -ro/Vl + 2( + )]/(1 - -У> (3-108)
о
Vrr(-,;i.-)/[i.2(.
= l-y/2R{r -Р4) [1 -~у/(У +
w-P*
(3.109)
Для получения приближенного решения этих уравнений в (3.108) положим Р2 я5 Рз, что дает формулу для г о; затем определяем рг по формуле (3.109). В рассматриваемом примере для вагонного подшипника 42726 Pi = 4 мм; Z, = 52 мм; Ro = 450 мм; г = 300 мм; Л = 60 м; = 16 мм;
= - 01 {2R) = 15996,3 мкм; рз = 15970 мкм; Го = 736 мкм; Рг = = 15234 мкм. Поскольку roJRo < 0,002; pj ? o = 0,032; {рг/Ro) = 0,0009; (r - Pa,)IR < 10 ; (P4 - Рз)1г < Ю то соответствующими членами в (3.108) и (3.109) можно пренебречь. Тогда
Го L-s/2Rir -Р4) -\/2г(р^ -Рз); РгРз-Го-
При других значениях параметров поверхности (3.107) для нахождения Рг и Го могут потребоваться точные соотношения (3.108) и (3.109).
1 ...
4 5 6 [
7 ]
8 9 10 ...
14
