Главная страница сайта
Российские промышленные издания (узловые агрегаты)
1 2 3 4 [
5 ]
6 7 8 ...
14 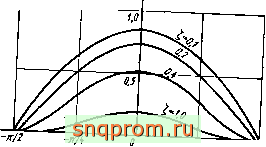
jr/2 if Риса.
В результате получим гху (1 - 2i )p chasinv,
I---(arctg-
: sui ip
eficha sin(p
Pchacostfi
/Schasin
- arctg
- 1 +--11
в плоскости 6?vz тензор напряжений имеет вид
(где т„,ах = у/тз~*~т^ - максимальное касательное напряжение в плоскости 05сТ) приводит этот тензор к диагональному виду
О О О О О - Тщах
В плоскости Oxz Тху = 0. На рис. 2.17 построены кривые т^ах(ц'; f) в плоскости Oyz.
Тензор напряжений в плоскости Oxz сложнее и имеет только две равные нулю компоненты - Тху и Туг. Выражение для максимального касательного напряжения в этом случае имеет громоздкий аналитический вид, поэтому его следует определять численно из исходных формул.
Преобразование координат
ГЛАВA3
СТАТИЧЕСКИЙ И ДИНАМИЧЕСКИЙ РАСЧЕТ ПОДШИПНИКОВОГО УЗЛА 3.1. КОНСТРУКТИВНЫЕ, ТЕХНОЛОГИЧЕСКИЕ И РЕЖИМНЫЕ ПАРАМЕТРЫ УЗЛА
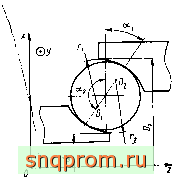
Введем правую неподвижную систему координат Oxyz (рис. 3.1) й рассмотрим сечение я-го подшипника плоскостью Оху (ось Oz направлена вдоль оси симметрии колец). Введем также координаты z, г, ф (угол ф отсчитываем в направлении кратчайшего поворота от Од: к Ои). Пронумеруем кольца подшипников: т = I соответствует наружному, ml=2 - внутреннему кольцу; число шариков в подшипнике обозначим . Воспользуемся общепринятыми обозначениями для геометрических параметров подшипника: Гщ - радиус кривизны поперечного сечения желоба т-го кольца; Z), (dj - диаметр по дну желоба наружного (внутреннего) кольца; Dy, - диаметр тела качения; ащ - угол контакта, положительное направление отсчета которого - от вертикали против часовой стрелки (на рис. 3.1 а, < 0). Так, например, для шарика, который не вращается вокруг оси Ог и центр которого лежит на отрезке Оу О2, 2 + f - Наряду с этими обозначениями при расчете будем пользоваться введенным В.Ф. Журавлевым семимерным вектором геометрических параметров Pi (/ = 1,..., 7), связь которого с общепринятыми обозначениями такова Рт =г„ рз =Z),/2, Р4 = dij2, Рт = D; Р4 + m - проекция вектора С>0, (см. рис. 3.1) на ось Oz. Эти обозначения удобны при рассмотрении подшипника с отклонениями геометрических параметров, поскольку позволя ют унифицировать параметры и сократить запись сложных выражений Таким образом, геометрия колец подшипника в сечении ф = const характе ризуется шестимерным вектором р= (pi,..., Ре)- Вследствие погрешнос тей изготовления кольца подшипника и шарики имеют геометрию, несколь ко отличающуюся от номинальной. Следовательно, вектор геометрии зависит от угла ф: Р = V (ф). Обозначим вектор номинальной геометрии через р = (р?,..., рбУ, Р? - номинальный диаметр шарика. Тогда погрешности изготовления колец, которые в дальнейшем считаем незначительными, можно описать вектором отклонений
р\Ф) = Р() -р =(р. () -pi, Р2{Ф)-р\;
Ръ{Ф)-Р%,рЛФ)-р1, Рв{Ф)-pt, Рб(Ф)-Pel
Для описания отклонений от сферической формы шарика следует ввести сферическую систему координат ip 9 r(ip - азимутальный угол; в - угол, отсчитываемый от полюса; г - радиальная координата). Тогда общий вид поверхности шарика можно описать функцией r{ip, в). Вектор отклонений разлагается в ряд Фурье:
(3.1)
0.10
0.05
Рис 3.1
где I - мнимая единица; - комплексная амплитуда (шестимерный вектор). Вектор c-jt комплексно сопряжен с вектором c/f, поскольку правая часть формулы (3.1) должна быть действительной. Так, для компоненты с номером / из соотношения (3.1) получаем
Рис 3.2
Р1{Ф) =
к = -
Соотношение (3.1) можно записать в эквивалентной действительной форме:
р'(ф) = 0,5яо+ 2 (а1(С05кф i-Ьк5ткф) = 0,5 2 (г^соъкф+
(3.2)
-ь Ь/свткф) ,
где c;t = 0,5(afc - гЪ) (pkl = 0,5(д^; - ibki),l = 1.....6) для а: о и Cq =
= 0,5ао, Ьо = 0. На практике диапазон суммирования ограничен не слишком большим числомЛ', так что \к\ <N. Из формулы (3.2) можно найти амплитуду A)fi fe-й гармоники /-го отклонения:
При этом соотношении (3.2) можно записать в еще одной эквивалентной форме:
р',(ф) = 0,5До, + 2 Ак1со$(кф + aki), (3-3)
где Uki определяется соотношениями sin/ = -ki/Aki, cosa;t/ = ki/Akii На рис. 3.2 представлена характерная профилограмма отклонений гео-
метрических параметров колец приборного подшипника до 20-й гармони1и включительно, где сплошная (штриховая) линия - амплитуды (fc).
Аналогично можно разложить функцию r{if,e) в двойной ряд Фуье по двум углам. Однако в дальнейшем вследствие упрощающих предположений потребуется лишь разложение диаметра 7(1) в экваториальной плоскости р7((/з) = Kv, 7/2) + r{fp + 7г,7г/2) по углу 1. Функцияр7(¥) имеет период, равный я-, поэтому ее разложение содержит лишь четные гармоники:
Р7(</)=07+ 2 ;t7Cos(2/:V+a;t7)-к > 1
Тогда погрешность р'7 изготовления шарика
p7(v)=o7-P7 + 2 Ау го%{1к^л-d). (3.4)
> 1
Для приборных подшипников при селективной сборке значение I 07 - I заключено в пределах 0,1 ... 0,3 мкм.
Геометрию сепаратора унифицировать сложнее вследствие различия применяемых конструкций. Выделим три необходимых геометрических параметра: - радиус базы сепаратора; Д - зазор базирования (т.е. разность радиусов цилиндрической поверхности кольца, относительно которой осуществляется базирование, и поверхности сепаратора); Ъ. -ширина базового пояска. Если сепаратор отсутствует либо базируется относительно тел качения, йу, Д и bj теряют смысл. Гнездо (окно) сепаратора может быть цилиндрическим, сферическим, коническим и т.д. В двух первых случаях радиус гнезда обозначим г^.
Геометрия ротора в общем случае не поддается описанию с помощью небольшого числа параметров, и в дальнейшем мы будем исходить из конкретной конструкции, поскольку для расчета значений отдельных величин (например, изгибной жесткости) нужно знать всю геометрию ротора. К режимным параметрам узла относят все параметры, определяющие условия его работы, в частности, частоту вращения ротора, характеристики электропривода, температуру окружающей среды, свойства применяемого смазочного материала и его количество, способ смазывания, характер сил, действующих на узел.
Важное значение имеют характеристики используемых материалов: физико-механические (модуль упругости, коэффициент Пуассона, твердость), теплофизические (удельная теплоемкость, теплопроводность, коэффициент теплового линейного расширения). Смазочный материал характеризуется зависимостью вязкости от давления и температуры, а также удельной теплоемкостью и теплопроводностью. Плотность смазочного материала, как правило, не входит в расчетные методики, за исключением лишь случая исследования явления срыва капель масла с сепаратора (джог-эффект).
3.2. статический силовой расчет узла
Статический силовой расчет шарикового подшипника при чисто осевом нагружении. При чисто осевом нагружении узла на каждый подшипник действует осевая сила. Рассмотрим один из подшипников (см. рис. 1.14). Пусть указанная сила равна F. Требуется определить нагрузку Р в контактах, угол контакта а, сближение 5 в контакте шарика с w-м кольцом и размеры эллиптических площадок (д^, Ъщ - большая и малая полуоси контакта), максимальное давление р^т- Условие равновесия внутреннего кольца имеет вид (а = а j или а = а; 2 )
F2=ZPsina, (3.5)
где Р вычислена с использованием формул Герца (2.17)-(2.20). Но сначала воспользуемся формулами для разности главных кривизн тел в контакте шарика с тороидальной поверхностью w-ro кольца
1 2
1 2
2т
(-l) cosa
(3.6)
где \lR\m и l/2,n - разность кривизн соответственно в плоскости поперечного сечения желоба и в плоскости, проходящей через отрезок О^Ог и являющейся ортогональной по отношению к упомянутой плоскости;
= Р2+ т (~ l) * Рт (1 - I - радиальное положение центра контакта с т-м кольцом.
Для сил Рт в общем случае в соответствии с решением Герца имеем
(3.7)
Km -
1- ! Ч-1
где Fl, Fj, Vl, 2 - модули упругости и коэффициенты Пуассона материалов шарика и колец; kgm - коэффициент, определяемый иэ аппроксима-ционной формулы (2.25) или из таб^т. 2.1 и зависящий от/?ют/2т-
Заметим, что применение формулы (3.7) связано с определенным противоречием, свойственным решению Герца. Проведем мысленный эксперимент. Пусть шарик контактирует с тороидальным желобом, сечение которого изображено на рис. 3.3. Если упругое сближение равно 5, то сила взаимодействия, вычисляемая по формуле Герца, Р = К8, где К, согласно (3.7), зависит от радиусов кривизны и упругих постоянных материалов шарика и желоба. Очевидно, что упругие силы потенциальны (отсутствует диссипация в материале), а потенциал является в данном случае функцией положения центра шарика. Пусть центр шарика перемещается вдоль радиуса желоба от положения, в котором происходит первоначальное его касание с желобом, до точки, в которой сближение равно 5. Тогда
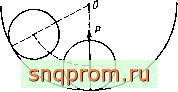
Рис 3.3
работа упругой силы I Kbdb =~КЬ(К не зависит от 5). С другой о 5
стороны, предположим, что центр шарика перемещается по дуге окружности, изображенной на рис. 3.3 штриховой линией, так, что сближение в процессе перемещения остается неизменным. При этом вектор силы (направленный к центру кривизны желоба) будет в процессе всего перемещения ортогонален вектору касательной к траектории движения. Следовательно, работа упругой силы равна нулю, и потенциальная энергия не должна измениться. Однако в конечной точке пути кривизны в контакте изменятся. В результате вместо К появится величина К'. Таким образом, потенциальная энергия в конечной точке равна 0,4 К'ХЬ.
Описанное противоречие вызвано тем, что сама формула Герца является приближенной, поскольку при ее получении тела заменялись эллипсоидами (уравнения поверхности раскладывались в ряд Тейлора лишь до квадратичных членов). Вследствие этого эпюра давления оказалась симметричной, а равнодействующая сил давления - направленной по общей нормали к поверхностям тел в точке контакта. Однако для того чтобы упругие силы обладали потенциалом, необходимо, чтобы имелась касательная составляющая силы. Такая составляющая может возникнуть в контактной задаче при учете кубических членов в разложении уравнения поверхности, из-за которых появятся асимметрия формы поверхности (и, следовательно, эпюры давления) и наклон площадки контакта. Таким образом, указанное противоречие свойственно самому решению Герца. Оно является принципиальным (поскольку не выполнено условие потенциальности упругих сил), хотя и происходит от небольшой количественной погрешности при решении контактной задачи. Точность решения Герца тем меньше, чем больше относительное изменение значения К (т.е. чем сильнее меняется кривизна желоба или упругие постоянные его материала) в области возможного контактирования.
Если нагрузка незначительно меняет угол контакта, будем вычислять К в состоянии предварительного касания шарика с кольцами, считая при этом значение К постоянным. В противном случае К будем рассчитывать в состоянии предварительного натяга.
Поскольку шарик находится в равновесии, то Pi = Рг = Р, а Р можно выразить через суммарное сближение Ьд = bi + §2 шарика с кольцами:
5о = iP/Ki) + (PIK) = Ко Р^; Р = КоЬ', Ко = (1 + Кг)-.
(3.8)
В состоянии предварительного касания шарика с кольцами расстояние V = ОхОг между центрами кривизны сечений колец равно р? + Рг - Рт.а угол контакта определяется косинусом
cosa = (p? + p5 + p3-p?)/v, (3.9)
с точностью до знака. Вследствие упругой деформации расстояние О^О^ увеличится на Sq , т.е.
v = p? + p5-P7+5o. (3.10)
Используя формулы (3.5) - (3.10), расчет можно вести итерационно в такой последовательсности. При 5о = О вычисляем v по формуле (3.10). Затем по формуле (3.9) определяем а. Находим Р из формулы (3.5). Далее определяем Кц, R21, Rn, R22 по формуле (3.6) к К^, Кг, Ко по формулам (3.7), (3.8), найдя предварительно отношения главных радиусов кривизны Rim2m и коэффициенты к^ = б(1т/-2га). Затем по формуле (3.8) определяем 5о и возвращаемся к вычислению v.
Если требуемая точность невысока и угол контакта не слишком мал, можно ограничиться одним приближением. По найденному значению Р определяем размеры площадок контакта йщ, Ъщ, максимальные давления Р^т и упругие сближения 5т согласно формулам:
Pom =kpm[PE\\IRim + l/2m)]; 5m =kf, [P\\IRy + l ?2m)/£ T.
(3.11)
Эти вычисления можно проводить вручную с использованием микрокалькулятора. При этом для определения коэффициентов кат, Нт, рт, к^щ можно пользоваться, приближенными формулами (2.22) - (2.25) или табл. 2.1. Используя 5о, можно рассчитать осевое сближение колец 5:
5z = (Р? + Р2 + Р4 - Рз ) I tga - tgao I,
(3.12)
где tto - начальный угол контакта, вычисляемый из формул (3.9), (3.10) при 5о= О .
При расчете нагрузки Р в контактах (для радиально-упорных подшипников с углом контакта Оо < 30°) с хорошей точностью можно пользоваться формулой
/=FJ/(Zlsmaol).
Пример 3.1. Провести силовой расчет подшипника 211 с габаритными размерами 55X100X25 мм. Параметры подшиш1ика: Dy/ = = 14,288 мм; j = pf = = = = 7,36 мм; = 77,5 мм - диаметр окружности, проведенной через центры шариков; а, = 1Г; Z = 10. Осевая нагрузка = 1372 И. Кольца и шарики изготовлены из одного материала, = = 208 ГПа, к, = = о,3.
Решение. Вычислим по (3.7) :
F = 2 (2 ~ -)- * = 228,6 ГПа.
2, 08 10
Определим геометрические параметры дорожек качения:
d, =Л*+ Л*=Р° + р5+ (pJ -p?)(1-cosc<o) = pJ + pJ = 77.5 мм.
Из формулы для начального угла контакта имеем
р' - Pt +Pt + р1=(р' +р1 - P?)cosir = 0,4241 мм.
Далее определяем
р1 = 45,898 мм; pJ = 31,602 мм.
В первом приближении определяем последовательно:
V =Р? + Pt -Р° = 0,432 мм;
а = а„ =11°= 0,19199 рад; sina = 0,19081;
Р= 1372/(10 0,19081) = 719,04 И;
Л.. = (-
-) = 0,24343 м;
14,288 10- 7,36 10-
/г., = Л„ = 0,24343 м; Л* =Р§ - pd -cosa) = 45.7628 мм;
Л? = Pj + р° (1 - cosa) = 31,7372 мм; , 2 0,98163
/г„= (------- )-1 = 8,4369 мм;
14,288-10- 2
14,288 10-
45,7628 10 0,98163 31,7372 10-
-)- = 5,8511мм;
RJRn = 3.4658 10-; Л„ г„ = 2,4036 10 .
Воспользуемся формулами (2.22)-(2.25) для коэффициентов кд, к} кр, ks, в которые вместо Ry/Rx следует подставитьи R IRii
1 (1--ffL = 0,1004; i- = 0,3433;
f0.1004)- > **
= 1,4664 - = 5,3078; kb, = 1.4184 а3433 (a 1004)- . =
0,3433
= аб051;
fcp, = 0,2295(ai004) = 0.1486; fce. = 1, 04(0, 1004) . = 0.6567;
1-(1---)= 0,07039; (- = 0,3056;
11 ia
(0,07039)-°°
Лд, = 1,4664 - = 6,1661; fcft, = 1,4184 ( 0,07039)-°>° -0,3056 = 0.557;
0,3056
kp, = 0.2295 ( 0,07039)° = 0.139; = 1.04 ( 0,07039) - = 0,6117
Найдем коэффициенты К К^,К^:
( 1 .)-. = (JL .. 1
-) = 8,1543 мм;
Л„ 0,24343 8,4369-10-
а:, = 2,286 10 (8,1543 10 ) ) = 38.79 ГПа - м ;
0,6567
0,24343 5, 8511 10
-)-> = 5.7138 мм;
К. = 2,286 10 (5,7138 10 ) (--) = 36,119 ГПа м ;
0.6117
0 = ((3.879 10 ) (3,6119 10°)- ) = 13,228 ГПа-м' .
Суммарное сближение шарика с кольцами 719.04
6 = i -) = 14,35 мкм.
S,3228- 10
Во втором приближении последовательно определяем:
V = 4,32 . Ю-* 1.435 10-* = 0,44635мм;cosa = 4,24-10-* (4.4635 10-*)= 0,94993; а = 18,21° ; sina = 0.3125; Р = 1372/(10 0,3125) = 439,04 И.
Изменение угла контакта (по сравнению с первым приближением) значительно, поэтому проведем расчет с новым значением угла контакта при прежних значениях
R* = 45.5295 мм; R* = 31.9705 мм;
0,94993
14,288-10- 45,5295 10-
2 0,94993
)- = 8.3954 мм;
-)- = 5.8931 мм;
14,288 10- 31,9705-10- /г„/Л„ = 3,4488 10-; Л„ г„ = 2,4209 10 .
Вычисляем коэффициенты kg. кь, кр, к^:
1 (1 bl-) = 9.994 10-; (l) = 0,3428;
fca, = 1,4664
(9.994 lo-2)-o,09
= 5,3178; kb, = 1,4184 0.3428(9,994 lO)
0. 3428
= 0.6045; fcp, = 0,2295 (9,994 10 ) = 0,1485; *6, = 1, 04 (9,994 10-) ° =0,6561;
1 - (1 - = 0,07088; ( -) = 0,3063;
. , (0,07088)-о'
1,4664--- = 6,148; fcj, = 1,4184 . (0,07088) - .0,3063 = 0,558;
0,3063
fcpa = 0.2295(0,07088)° = 0,1392; fcj, = 1.04 (0,07088) = 0,6125. Найдем коэффициенты а: л: А: :
ХГ = 8.1155мм; а:, = 2.286 10 (8.1155 10-)/2 . ( =
0, 6561
= 38.75 ГПа м ; (-i + ! )- = 5.7538 мм; и и
К, = 2.286 . 10 (5.7538 Ю ) V2( L )3/2 j. .
0,6125
А: = 13.232 ГПа. м . Затем определяем
, 439,04 2/3
Ч.3232-10 °326 мкм.
В третьем приближении последовательно вычисляем: V = 4, 32 . Ю- + 1,0326 10- = 0,44233 мм; cosa = 4. 24 . 10-А4,4233 Ю *) = 0.95856; а= 16,55°; sina= 0,2849;
Р = 1372/ (10 0,2849) = 481,57 Н.
Вычисление R . Ru. Rn< К,. K,R,jRtk опустим, используя для дальнейшего расчета значения, полученные во втором приближении:
, 481,57 л/з ,3232-10-°> - 10>98мкм.
в четвертом приближении последовательно определяем:
v= 4,32 . 10- + 1,098 . 10- = 0,44298 мм;
cosa = 4.24 10-/(4,4298 Ю-) = 0.95715;
а = 16.83° ; sina = 0.2896; Р = ПЩ (10 0,2§96) = 473,76 Н;
4,7376 10 2/3
о = (-) = 10.86 мкм.
1,3232 10°
Результаты получены с более чем достаточной точностью (погрешность *1 %) .
Определим размеры контактов, максимальные значения давления и упругие сближения по формулам (3.11), используя найденные значения ки к К +
+ Ryy: ft рт> miirn
а 5.3178 473,76-8,1155-10- \,Ъ62
t ~1 , -) =1 J мм;
b 0,6045 2,286 10 0,1549
2,286-10
р„ =0,1485[473,76(-) ]3= 1,072 ГПа;
8,1155 - 10-
6.= (4/= -)/ = 5.31 мкм;
л, 3,875-10°
fl, ,6.148 473,76-5,7538-10- ,/3 1.405
[ ] = [ ] (-) = [ ] мм;
Ь. 0,558 2,286- 10 0,1275
р., = 0,1392[ 473.76 (
2,286 - 10
.)] = 1.264 ГПа;
6, = (-
473.76
5,7538 10- -) = 5,55 мкм.
3,6174 - 10°
Определим осевое сближение колец по формуле (3.12): 6z = 4.24 Ю- itg 11° - tg 16,83° I = 45,8 мкм.
При необходимости проведения параметрического исследования различных конструктивных вариантов подшипника следует использовать ЭВМ.
Перейдем к оценке влияния центробежной силы. Предположим, что для данного подшипника уже проведен расчет при чисто осевом нагружении. Введем систему координат, как показано на рис. 3.4, направив ось Сп вдоль линии контактов, ось С1 - перпендикулярно ей; а* - угол контакта в состоянии предварительного натяга. Если к центру О шарика приложена сила, например, центробежная, равная F, то О' переместится из положения при предварительном натяге и будет иметь координаты (Д/, Д„). Предположим, что сила Fц невелика и смещения малы. Введем обозначения: СОт = Vm = - р?/2 (т= \, 2). Упругое сближение в контакте с т-м кольцом вычисляем по формуле
5 = 0.5 -+ , + [(- 1) у т-А„ ] = Sm + (- ir А„
плюс слагаемые более высокого порядка малости. Вектор силы, действующей на шарик, Fl
F m=i.2
X [ m
(-1) у,;,-д„ m = 1.2
+ l(-l) vm -Ди1
-PV->Al Vl) Vm-Aj*Ll,5PS-.Aj
где
Таким образом, жесткости положения шарика в направлениях С/ и Сп
2 - - (3.13)
Для всех подшипников, собранных с предварительным натягом, <7 KilK <L
Так, для подшипника 211
б = [(5,31 10-)- + (5,56 10-)- 1 = 2,72 мкм;
V, =v,= 0,216 мм; у= [ 2(0,216 10 )-) = 0,108 мм;
К„ = 1,5 . 473,76(2,72 10-)- = 2,61 10 Н/м;
А/ = 473,76(1,08 . 10- )- =4,39 10 Н/м; KilK = 0,017.
Если заданы компоненты силы, то смещения центра шарика определяем по формулам
А„ =F IK ; А, =F,IK,.
В результате смещения произойдет изменение углов контакта. Угол контакта с т-м кольцом изменится на Аа , = A v, так что новый угол контакта с наружным кольцом будет = а* -Да а с внутренним кольцом aj = тг + а* + Да2.
Вследствие большой жесткости вдоль линии контакта действующая на шарик центробежная сила приводит к смещению его центра в направлении, ортогональном к этой линии, что вызовет изменение углов контакта. Смещение же вдоль линии On, хотя оно и мало, приведен к изменению нагрузок в контактах. Если центробежная сила мала в сравнении с нагрузкой в контакте, то можно оценить нагрузки Рщ в контактах. Иэ формулы Герца следует
Рт = Кт[дт + (- irAnf =Р+ 1,5(-1) * + Д„ =
Р+ 1,5(-1)
Таким образом, нагрузка на наружном кольце увеличится на 1,5 PF l(K Si), а на внутреннем уменьшится на 1,5 PF I(K 82) (сумма этих изменений равна F ).
Пусть кольца подшипника вращаются с угловыми скоростями 0,щ (положительное направление вращения соответствует повороту от оси Ох на рис. 3.4 к оси Оу). Тогда в точках контакта поверхности колец будут иметь скоростиRmm Предположим, что в точках контакта отсутст-
Рис 3.4
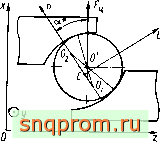
вует проскальзывание шарика относительно дорожки качения. Тогда, если угловая скорость орбитального движения шарика равна сОс> а проекция угловой скорости его собственного вращения на ось С/(см. рис. 3.4) равна со/, то скорость движения центра уь = <с(* + г)/2, а скорости поверхности кольца в точках контакта равны R,m Условие отсутствия проскальзывания в направлении движения сводится к уравнениям
Уй + 0,5p?co/ = /?tni; п -0,5p°jiOi=Rt2, из которых находим
Vft =coc(/??+/?l)/2 = 0,5(/??S2i + /?5S22);
=--: c = -
(3.14)
R** Rt
Центробежная сила, действующая на шарик.
F, Rt + Rt , Rfi + .2
)2[Sina*j.
(3.15)
ть = np-
(P?)
где p - плотность материала шарика.
Пример. 3.2. Определить значение центробежной силы для подшипника 211, если его внутреннее кольцо врашается с частотой 10 ООО мин-; плотность стали р = = 7,83 10 кг/м'; а* =-16,83° .
Решение. Вычислим параметры, входящие в формулу (3.15) :
(14,288 10- ) mj, = 3,1416 7,83 10 -i---
= 11,96- 10- кг;
П, = 0; П, = 10* 2 г/60= 1047,2 рад/с; R* = 45,5295 мм; Л? = 31,9705 мм. Абсолютное значение центробежной силы
F= 1,196 10- 38,75 10- (1047,2 31,9705/77,5) = 86,5 И. Вычислим компоненты вектора Рц:
Fl =- 0,2896 86,5 = -25,1 И; F = 0,957 86,5 = 82,79 И. Определим перемешения центра шарика Д/, Д„, используя рассчитанные значения жесткостей АГ/, АГд:
Д/ =-25, 1/4,39 10=-5,72 мкм; Дй= 82,79/2,61 10 = 0,317 мкм. Вычислим изменетие углов контакта:
Да. =-5,72- 10-/(-(14,288 10-)/27.36- 10-) = 2,648-10 = 1,52° = = - Да,.
Таким образом, углы контакта шарика с кольцами
а, =-16,83° + 1,52° =-15,31°; а, = 18(У - 16,83° - 1,52° = 161,65°.
Как видно, изменение углов чрезвычайно мало.
Вычислим изменение нагрузок в контактах. Нагрузка на наружном контакте увеличится на l,5PF l(К„&,) = 1,5 473,76 82,79/(2,61 10 5,3 Ю ) = 42,53Н,
а на внутреннем колы4е уменьшится на \,5РР /(К„6) = 1,5 473,76 82,79/(2 6 X X 10 -5,55 10- ) =4а77Н.
Изложенный метод учета центробежной силы применим в том случае, когда изменение углов контакта и относительное приращение силы в контакте малы, т.е.
-< 1; 1,5-l(m= 1,2).
Эти условия верны для большинства расчетных случаев. Невыполнение второго условия свидетельствует о неправильном выборе подшипника, J поскольку существенно увеличивается нагрузка на наружное кольцо. Пер- * вое условие может в принципе не вьшолняться для упорного подшипника с углом контакта, близким к 90°, и (или) с малой осевой нагрузкой, когда жесткость Ki недостаточно велика. Если указанные неравенства не соблюдаются, то необходимо решать задачу в полной постановке, исходя из системы двух нелинейных уравнений равновесия шарика
sina
cosa т =
Л:т(6т+ (-1) *Д„)
+ I(-l) vm -Д„]
-А, (-l) vm - Д„
относительно Д;, Д„ (положение колец считается неизменным). В общем случае такое решение проводят численно.
Рассмотрим влияние толщин пленок смазочного материала, возникающих в контактах при вращении колец. Сохраним предположение об идеальной кинематике, т.е. об отсутствии проскальзываний в контактах. Как известно, в формулы для толщины пленки входит скорость качения, равная полусумме скоростей поверхностей в системе, связанной с контактом (относительно которой последний неподвижен). Перейдем к указанной системе, связанной с т-м контактом. Скорость движения ее начала в неподвижной системе равна Rcc, а скорости шарика и кольца в точке контакта в этой системе равны Л^(Лт-Ч;)-Скорость качения вычисляется по формуле
Чт = Rm - <с\ Ui= U2 =
(3.16)
R**R*
Обозначим толщину пленки в контактах . Для ее вычисления имеется ряд формул. Наличие смазочной пленки в контактах при фиксированном осевом положении колец приводит к увеличению суммарного упругого сближения шарика с кольцами на величину ht + из- Предположим, что в начальном состоянии в подшипнике имеется осевой натяг и осевое положение колец зафиксировано. Очевидно, что наличие пленки не изменит углы контакта. Пусть 5* - упругое сближение в состоянии предваритель-96
ного натяга. Тогда, если Sq - текущее значение упругого сближения, то 5о = 5*+ Й1 + Й2. (3-17)
Толщину пленки в контакте рассчитываем по формуле
, =R,UUS2-o,6s)i-ri-y\
Rim Rim Рот
(3. 18)
где Но, Up - динамическая вязкость и пьезокоэффициент смазочного материала при нулевом давлении.
Рассчитываем контактные нагрузки и толщины пленки, используя метод последовательных приближений.
Вычисляем сначала скорость и качения в контактах по формуле (3.16). Для упрощения расчетов находим коэффициенты = 2 m (1,82 -- 0,68R2m/Rtm)i( p/R2mf*> постоянные для всех приближений. Необходимые для вычислений значения Rim, Rim, возьмем из статического осевого расчета, проведенного без учета смазочных пленок.
В первом приближении рот равным значениям при предварительном натяге, в последующих приближениях рот вычисляем по формуле (3.11). Затем определяем толщины ht, пленок , вычисляем упругое сближение по формуле (3.17). Далее по формуле (3.8) находим нагрузку Р в контакте. Если полученное значение мало отличается от значения, определенного в предьщущем приближении, то расчет закончен.
Пример 3.3. Найдем толшины hm пленки и максимальные значения контактного давления для подшишшка 211, смазочный материал МС-20, вращается внутреннее кольцо, iij = 314 рад/с, температура колец 323 К. Использовать данные предыдущих примеров. Смазочный материал имеет следуюш}1е параметры: ц„ (323 К) = 0,141 Па-с, ар= 2,79 - Ю-Па-.
Решение. В первом приближении сначала вычислим
45,5295 - 31,9705 , ,
45,5295 . 31.9705-
Определим коэффиш1енты к^:
Rii =Rii = 0,24343 м; Л„ = 8,3954 мм; Я„ = 5,8931 мм;
= 8.3954. 10(1,82-о,бвП':!Г') i-Л'!!ilV-=
= 1,022 - 10- м;
-к;= 5,8931 10-(1,82-0,68
0,24343
5,8931 - 10- 0,24343
8,3954 10-
.0.141-5,898-2,79-10-) зм 93 . q- м; 5,8931 - 10-
Ро, = 1,072 10 Па; р„ = 1,264 - 10 Па; Е' = 2,286 - 10 Па. Далее последовательно находим; 4-444
л, = ПС, (J) = 1.022 . 10- ( lL} ) ш 3 91 Ро, 1,072 10
А, =7Г, ( ) - = 9,39 10-(
-= 3,44 мкм;
1,264 10
о = 10,86 + 3,91 + 3,44 = 18,21 мкм; А, = 13,232 Ша м*; Р= 1,3232. 10:° (18,21 . 10-)** = 1028,23 Н.
Во втором 1фи6лижеиии вычислим максималыше контактные давления по формуле (3.11):
р.. = *р. -) - = о. 1485[ 1028.23(2.286.10 )
iRi+Ri})- (8.1155 10-)
= 1,388 10 Па; р„ = 1,636 10 Па.
Затем определим
А. = 1.022 10- ( 2286 0 i/4 3 1.388 10
А, =9.39. 10-( 5) *= 3,23 мкм; 1.636. 10
6, = 10,86 + 3,66 + 3,23 = 17,75 мкм;
Р = 1,3232 . 10° (17,75 . 10-) = 989,52 Н.
В третьем приближении найдем
р.. = О, 1485[ 989,52(2,286.10 ) .3 , 3, . (8.1155 . 10-)
Р„ = 1.62 . 10 Па; Л, = 1.022 .10- ( ) = 3,67 мкм;
1.37 . 10
2 286 10
А, = 9,39 . Ю- ( ---)* = 3,24 мкм; , = 10,86 + 3,67 + 3,24 = 17,7 мкм;
Р= 1,3232- 10° (17,77-10-)= 991,2 Н.
Значения Р, полученные во втором и третьем приближошях, отличаются менее чем на 0,2 %. Такая точность вполне достаточна. Если сравним результаты расчетов, проведашых в этом примере, с результатами расчетов 1фимера 3.1, увидим, что нагрузка в контакте из-за наличия пленки смазочного мато>иала возросла почти в 2 раза, значение контактного давления увеличилось в \/Т= 1,27 раза, а у1фугое сближение в 1,7 раза.
Получим выражение для осевой жесткости подшипника. При предварительном натяге в контактах шарика с кольцами сосредоточена упругая энергия, а шарики являются своего рода нелинейными пружинами, сжатыми силами Р на бо, причем Р = KoBl. При увеличении v на Д' деформация 5о пружины увеличится на то же значение, что приведет к увели-98
чению силы на АР = ЗКоВ Д'/ 2, т.е. жесткость пружины (шарика) /Се = = 3P/(2So).
Предположим теперь, что осевое расстояние между центрами кривизны сечения колец увеличилось на А^. Тогда v увеличится на Д у= Д28Ш а|. Тангенс угла контакта получит приращение Ajipl + Рг + Ра -Рз) [см. (3.12)], а синус угла контакта изменится при этом на Дгсов'а/у. Осевую силу, действующую на подшипник, вычисляем по формуле (3.5). В результате осевого смещения она изменится на значение
AF, = Z(APsina + Р^ А,) = Z-Aml + с1§а)Д,.
Осевую жесткость подшипника находим по формуле
z = zsinVl+ ,ctga).
26, 3v
(3.19)
Второе слагаемое обусловлено изменением угла контакта при осевом смещении. Поскольку §о/ 1, то
Кг =--Zsina. 2 о
Значение указанного слагаемого существенно лишь при малых а, т.е. для радиальных подшипников.
Оценим второе слагаемое в формуле (3.19) и рассчитаем осевую жесткость подшипника 211:
i!lg. , 2.1.086.10- 0.95715 3 4,4298 Ю- 0,2896
Кг = i.iO-lZ!l.(0,2896) 1.179 = 6,47 10 Н/м. 2 1,086 10
Как видно, значение второго слагаемого в формуле (3.19) в данном случае сушест-венно.
Если требуется найти жесткость узла, необходимо сначала найти жесткость каждого подшигашка, а затем просуммировать полученные значения.
Статический силовой расчет узла при комбинированном нагружении с учетом погрешностей изготовления.Рассмотрим статически нагруженный шариковый подшипник, к кольцам которого приложены осевая, радиальная силы и момент. В результате кольца подшипника получат взаимные перемешения в осевом и радиальном направлениях и, кроме того, произойдет перекос.
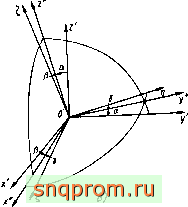
Введем две правоориентированные системы координат: К = Oxyz - неподвижная, А^= 0tjf -связанная с кольцом (рис. 3.5, а). Координаты точки в двух системах связаны следующими соотношениями:
(3.20)
где лго, >о. 0 - координаты точки О' в неподвижной системе; 5 - матрица поворота.
Представим S в виде произведения матриц соответствующих трем простым поворотам вокруг осей (рис. 3.5,6, в) :
5 = 5(a,,7) = 53(7)52(>Si(a),
где
| | C0S7 | sin 7 | | | | | |
5з(7) = | -sin 7 | cos 7 | | > | | | |
| | | | | | | | |
| | cos3 | | -sin3 | | | | |
| | | | | , 5i(a) = | | cosa | sin a |
| | | | cos3 | | | -sina | cosa |
Тогда
5(a,,7) =
cos3cos7 cosasin7 +
+ sinasin3cos7
-cos3sin7 cosacos7-
-sinasinsin7
-sinacos
sinasin7 -
- cosasin3cos7
sina cos7 +
+ cosasin3sin7
cosacos3
Наглядно переход от системы К к системе К' показан на рис. 3.5,д - е. Вначале совершаем параллельный перенос так, что точка О совмещается с точкой О', а оси Ох, Оу, Oz - с осями О'х, О'у', Oz (см. рис. 3.5, б). Затем выполняем три простых поворота (см. рис. 3.5, в) :
1) поворот вокруг оси О'х ( на угол а, при котором оси О'у и Oz совмещаются с осями О'у и Oz , причем ось О'у попадает в плоскость 0%г\; заметим, что в результате этого поворота ось О'у оказывается перпендикулярной осям Of и Oz ;
2) поворот вокруг оси О'у'нг. угол до совмещения осей Oz и Of; при этом ось О'х системы О'х'у z окажется в^плоскости 0%y\;
3) поворот вокруг оси Of на угол 7 до совмещения осей О'х , О'у с осями 0%, О'т].
В дальнейшем потребуется выражение вектора угловой скорости системы К' в проекциях на неподвижные {fix, у, z) и связанные (J2j,
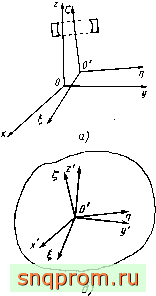
Рис 3.5
J2, Щ) оси. Предположим, что имеются а, 3,7.Вектор угловой скорости является линейной комбинацией производных а, 3, у, т.е.
(3.21)
где В - матрица, для нахождения которой воспользуемся несложными соображениями.
1. Вектор угловой скорости, обусловленный а, направлен по ocw.Ox и равен по значению а. Таким образом, = 1,21= О, Л31 = 0.
2. Вектор угловой скорости, обусловленный 3, направлен по оси О'у и равен по значению Д Координаты х, у , z их, у', z связаны соотношением
т.е. 5-12 = 0,22 = cosa, 5з2 = sina. ,
3. Вектор угловой скорости, обусловленный у, направлен по оси Of, по-этбму = sin3, 23 = - sinacosjS, 33 = cosacos.
1 2 3 4 [
5 ]
6 7 8 ...
14
