|
Главная страница сайта
Российские промышленные издания (узловые агрегаты)
1 [ 2 ] 3 4 5 ... 14  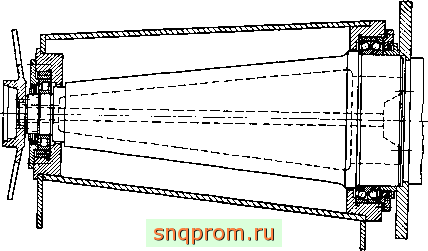 наружными уменьшается радиальный зазор. Сдвоенные шариковые подшипники имеют осевой зазор 250...4000 мкм. Смазывание осуществляют погружением в ванну с жидким смазочным материалом. Чтобы из подшипников не вытекало масло, а окалина и охлаждающая жидкость не проникали в подшипники, предусмотрено лабиринтное уплотнение. На рис. 1.10 представлены подшипники промывного барабана. Масса барабана 60 т, диаметр 2100 мм, длина 7,5 м, мощность привода 100 кВт, частота вращения 9 мин . Барабан опирается на пустотелые цапфы, через которые загружают и выгружают сыпучий материал. Из-за большого расстояния между подшипниками было бы целесообразно применять самоустанавливающиеся роликовые подшипники. Однако они имели бы слишком большие габариты и чрезмерную долговечность, поэтому применяют цилиндрические роликовые подшипники с закругленным меридианом роликов. Осевая нагрузка воспринимается фасонными кольцами со стороны фиксирующего подшипника. На рис. 1.11 изображена опора оптического телескопа, длина которого 8 м, масса 10 т. Диаметр зеркала 1 м. Вследствие малой частоты вращения вильчатой оси (1 оборот за 24 ч) момшт сопротивления ее вращению должен быть прежде всего постоянным и достаточно малым. Вилка должна быть ориентирована очень точно и жестко. В качестве фиксирующей опоры служит двухрядный радиально-упорный прецизионный шариковый подшипник с разъемным наружным кольцом. Подшипник имеет размеры 600X730X98 мм. Расстояние между обеими половинами наружного кольца должно быть выбрайо так, чтобы обеспечить усилие натяга, равное 35 кН. Плавающая опора выполнена в виде цилиндрического роликового подшипника. Несмотря на коническую форму вильчатой оси, ее прогиб настолько велик, что может приводить к увеличению трения в двухрядном подшипнике. Поэтому роликовый подшипник снабжен двумя эксцентричными кольцами, которые при монтаже вращают так, чтобы ликвидировать прогиб оси в месте расположения шарикового подшипника. Кроме того, для самоустановки меридиан дорожки внутреннего кольца роликового подшипника имеет форму дуги окружности с большим радиусом. На рис. 1.12 представлена симметричная конструкция гиромотора с одним двигателем и составным маховиком. Такие констукции применяют в приборах, где требуются малые значения кинетических моментов, например, в интегрирующих и дифференцирующих поплавковых гиро-приборах и в гирокомпасах. Приведенные примеры использования ПУ дают представление о разнообразии конструктивного исполнения, условий работы и требований к характеристикам. Для одних ПУ важна высокая долговечность, для других - высокая жесткость, точность вращения, стабильность момента сопротивления вращению или низкий уровень вибрации. Расчет характеристик ПУ требует системного подхода. Но возможна единая расчетная схема ПУ. Действительно, во всех примерах ПУ представляет собой ротор, опирающийся на один, два или несколько подшипников, установленных в 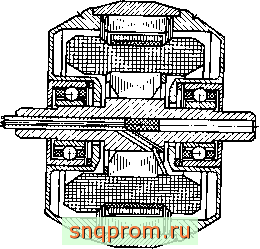 РИС. 1.12 корпусе. Вращаться может и корпус вокруг неподвижной оси, а у каждого подщипника вращающимся может быть как внутреннее, так и наружное кольцо, однако суть принципиальной расчетной схемы не меняется. Но даже для исследования такой простейщей расчетной схемы необходимо использовать уравнения теории упругости, динамики систем твердых тел, теории трения, смазки и изнашивания, механики разрушения и широко применять математические методы. 1.2. ПРИНЦИПИАЛЬНАЯ СХЕМА ПОДШИПНИКОВОГО УЗЛА Выше были рассмотрены различные примеры применения подшипников качения. Неизменным функциональным узлом описанных конструкций является ротор на подшипниках качения, число, расположение и тип которых могут быть различными. Для обеспечения необходимой жесткости во многих узлах создается предварительный осевой натяг. При этом осевые люфты в подшипниках выбираются по-разному: пружинами, шайбами, прокладками, с помощью крепления колец в упругие крышки и (или) упругой стяжкой, проходящей внутри полого ротора (рис. 1.13). Общий вид узла представляет собой ротор на нескольких подшипниках качения (в книге будут рассмотрены в основном шарикоподшипниковые опоры). Наиболее распространенный узел - ротор на двух радиально-упорных шариковых подшипниках. Такой узел обладает достаточными радиальной, осевой и угловой жесткостями и способен воспринимать радиальную и осевую нагрузки, а также моменты. Угловая жесткость равна отношению поперечного момента системы сил (с равнодействующей, равной нулю), действующего на ротор, к углу перекоса оси ротора. Каждый подшипник (см. рис. 1.13) состоит из наружного 1 и внутреннего колец, сепаратора 3 и комплекта шариков 2. Как правило, внутренние кольца неподвижно крепятся на роторе, а наружные закреплены в корпусе. Однако возможно крепление наружных колец и на роторе. Некоторые узлы выполнены по обращенной схеме, когда статор находится внутри ротора. Кольца закрепляют на роторе различными способами: клеем, напряженной посадкой или на винтах. Если внутреннее либо наружное кольцо выполнено непосредственно на роторе, то опора называется совмещенной. Этот случай характерен для прецизионных шарикоподшипниковых узлов, поскольку позволяет избежать перекосов колец при посадке. В большинстве практически важных случаев крепление колец можно считать жестким, так как смещение тел в стыках пренебрежимо мало, хотя иногда Рис. 1.13 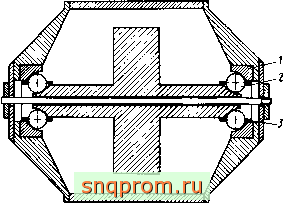 следует учитывать демпфирующие свойства стыков, особенно прн оценке уровня вибрации узла. В процессе работы на ротор и элементы подшипников действуют внешние силы и моменты, в частности, от привода, вращающего ротор. Отдельные элементы подшипника взаимодействуют друг с другом по сравнительно малым областям контакта. Возникающие здесь силы взаимодействия будем считать внутренними. Выделение внешних сил до некоторой степени условно. Так, при включении в состав узла силовой схемы, создающей осевой натяг, силы со стороны стяжки и упругой крьшпси становятся внутренними. Элементы подшипников с достаточной для практики степенью точности можно считать жесткими телами, локально упругодеформируемыми в малых областях контакта. Аналогичное предположение часто верно для ротора, если его длина не слишком велика и можно пренебречь упругим прогибом. Однако при расчете радиальной жесткости узла важно учесть прогиб. Глобальная упругая деформация колец подшипника во многих случаях может привести к перераспределению нагрузок в контактах с телами качения. Этот эффект особенно значителен, если радиальная нагрузка, действующая на подшипник, велика, толщина кольца мала по сравнению с его длиной и, кроме того, отсутствует жесткая заделка кольца по его поверхности, свободной от контактов с телами качения. Номинальная форма желобов колец шарикоподшипника - тор. Отклонения геометрических параметров дорожек качения, а при напряженной посадке - отклонения от правильной геометрической формы посадочной поверхности, непосредственно влияют на вибрационные характеристики узла: уменьшение отклонений ведет к улучшению этих характеристик. Сепаратор подшипника служит для разделения (сепарирования) тел качения и удержания их на определенном расстоянии друг от друга. Сепараторы различают по типу базирования. Если сепаратор в процессе движения касается наружного (внутреннего) кольца, то говорят о наружном (внутреннем) базировании. Если же касание отсутствует, то сепаратор базируется относительно тел качения. Возможен также случай смешанного базирования, т.е. касания сепаратором двух колец. Окна сепаратора могут быть различной формы. Наиболее распространены сепараторы с окнами в форме сферы илн цилиндра. Иногда встречаются более сложные формы: например, конус при базировании относительно тел качения. Для этой цели возможно использовать окна в виде скошенных цилиндров, что имеет неоспоримые преимущества. В некоторых шариковых подшипниках сепаратор отсутствует. Как показывают эксперименты, прецизионные узлы с подобными подшипниками имеют хорошие характеристики, особенно по стабильности момента сопротивления вращению и толщины пленки в контактах шарик-кольца. 1.3. уровни моделирования и эксплуатационные характеристики узла К эксплуатационным характеристикам подшипникового узла относят нагрузки и давления в контактах; осевую, радиальную и угловую жесткости; толщину смазочной пленки в контактах; кинематику тел качения и сепараторов; момент сопротивления вращению вала; уровень и и спектр вибрации; нагрузки, действующие на сепаратор со стороны шариков и центрирующих поверхностей; тип движения сепаратора; уровень нестабильности динамических параметров; долговечность. Для расчета перечисленных характеристик необходимо разработать математическую модель узла, включающую все существенные на выбранном уровне факторы. Степень сложности модели следует выбирать, исходя из потребностей расчета. Так, например, для расчета номинальных нагрузок в контакте шарик-дорожка при чисто осевом нагружении достаточно рассмотреть равновесие шарика между идеальными кольцами (рис. 1.14). На кольца извне действует сила Fz, приводящая к относительному осевому перемещению центров кривизны поперечного сечения желобов колец Oj и Ог- Единственной неизвестной величиной в этой задаче является длина отрезка . Определив 0x0-1 из уравнения равновесия одного из колец, можно найти значения всех функционально зависимых величин: угол контакта а. (с наружным кольцом); нормальную нагрузку Р в контактах; а и д - большую и малую полуоси эллиптической площадки контакта; Р^ - максимальное давление в контакте; 5i (62) - упругое сближение центра шарика с наружным (внутренним) кольцом. Угол контакта (см. рис. 1.14) отсчитывают от вертикали против часовой стрелки, и для наружного кольца он отриизтелен (либо превышает 1,57г ), а для внутреннего кольца равен а + тг, так как при отсутствии центробежной силы центр О' шарика лежит на отрезке О^О^. При расчете нагрузок Рщ в контактах шарика используют формулу Герца Р^ = A:m5m где Кщ - коэффициенты, зависящие от типоразмера подшипника и упругих постоянных м.атериала колец и шариков. При учете вращения каждого из колец подшипника модель усложняется. Если в центрах контактов шарика с кольцами, имеющими угловые скорости 1 и предположить идеальную кинематику (т.е. отсутствие проскальзывания в этих точках), то можно определить угловую скорость движения центра шарика по круговой орбите сос = (Л?П, +2* 2)/(2/?*), где 1R* = + - диаметр окружности центров шариков, и проекцию uj угловой скорости шарика на линию, перпендикулярную линии контакта 0,02: где Dw - диаметр тела качения (шарика или ролика). 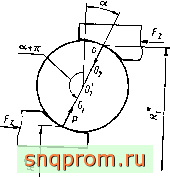 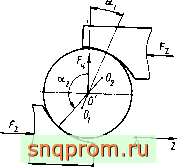 Рис. 1.14 Рис. 1.15 Для подшипника, собранного с осевым натягом, проскальзывание практически отсутствует. На шарик массы тъ в связанной с ним системе координат (рис. 1.15) действует центробежная сила инерции = тйЫс.Л*. Учет этой силы в уравнениях равновесия приводит к смещению центра шарика с отрезка О^Ог- Углы контакта с кольцами в этом случае не связаны соотношением = ttj + тг, а для определения положения центра шарика необходимо решить систему трех нелинейных уравнений (два уравнения определяют положение точки О' при заданном положении колец, а третье - осевое расстояние между центрами и О^). После этого находим силы и максимальные давления в контактах, размеры площадок контакта и углы ], 2. Дальнейшее усложнение связано с необходимостью учета смазочной пленки в контактах, толщина которой зависит от переменных Wc, W/, со , сОт.где соя - составляющая угловой скорости шарика, перпендикулярная области контакта; cj - составляющая угловой скорости, направленная вдоль касательной к окружности центров. Кроме того, толщина пленки зависит от нагрузок в контактах. С другой стороны, изменение толщины пленки приводит к изменению нагрузок. Моменты, действующие на шарик со стороны колец (с учетом гироскопических моментов), должны уравновешивать друг друга. Эти моменты определяются полем касательных напряжений на площадках контакта, которое непосредственно связано с полем скоростей проскальзывания, в свою очередь, выражающихся через со, <ju <пу т- Таким образом, получаем систему уравнений, из которой определяем две координаты центра шарика и его кинематику. В этой модели необходимо иметь выражения для касательных напряжений по площадке контакта и формулу для расчета толщины пленки, полученные из эластогидродинамической теории смазки. При расчете потерь мощности возникают дополнительные усложнения. В частности, если предположить, что сепаратор занимает центральное поло- жение и взаимодействует с шариками, то в уравнения равновесия шарика добавляются силы и моменты со стороны сепаратора, которые зависят от указанных выше переменных и еще двух дополнительных неизвестных: осевого положения сепаратора и углового положения шарика в окне, для определения которых, в свою очередь, имеем уравнение равновесия сил, действующих на сепаратор, в проекции на ось Oz и условие равенства нулю осевой проекции момента, действующего на сепаратор. Модель можно дополнительно расширить для определения поля температур всех элементов узла. При этом следует рассмотреть распространение теплоты во всех элементах с учетом теплообмена на границах и источников тепловой энергии как внутри, так и вне узла. К числу основных источников относят подвижные контакты с тепловыделением, обусловленным трением (без смазочного материала либо гидродинамическим, происходящим в тонких смазочных слоях из-за сдвиговых напряжений), обмотки электродвигателей привода с выделяющимся в них джоулевым теплом, токи Фуко в массивных телах. Перенос теплоты осуществляется внутри тел, газовой средой или охлаждающей жидкостью, в многофазной среде (при смазывании масляным туманом), а также посредством излучения. В общем случае задача определения поля температур ставится совместно с задачей нахождения кинематических и геометрических переменных. В результате получаем систему уравнений, включающую уравнения в частных производных (теплопроводности) и ненинейные соотношения статики. Иногда с удовлетворительной степенью точности можно схематизировать сложную геометрию узла и заменить непрерывное температурное поле конечным набором неизвестных температур отдельных поверхностей и элементов конструкции (мегод конечных элементов) с учетом сосредоточенных тепловых сопротивлений в сопряжениях. В результате указанной процедуры модель упрощается и сводится к системе нелинейных соотношений. Однако тепловой расчет уже сам по себе представляет весьма сложную задачу в том смысле, что очень трудно учесть все тепловые источники и стоки и правильно описать их количественно. Так, например, используемый часто в таких задачах закон конвективного теплообмена на границе твердого тела и газа, видимо, неточен. Более правильно было бы рассматривать теплопередачу в окружающей тело атмосфере. Однако эта задача еще сложнее, особенно если твердое тело вращается и, следовательно, газ в его окрестности движется. Для определения же температуры в потоке необходимо знать поле скоростей потока. Таким образом, задача становится чрезмерно сложной. Для упрощения ее обычно пользуются экспериментальными значениями температур в нескольких точках. Это позволяет получить решение, но, как правило, с невысокой точностью. Кроме того, определение температурного поля представляет собой весьма специальную задачу, и не для всех узлов ее решение является необходимым. Все описанные выше модели по существу статические. Хотя кинематика шарика и учитывалась, она была заданной, не зависящей от времени. Кроме того, нагружение сохраняло осевую симметрию подшипника, что позволяло ограничиться рассмотрением одного шарика. На практике ротор на подшипниках может подвергаться действию внешних радиальных нагрузок (в общем случае распределенных) и поперечных моментов, нарушающих осевую симметрию. Для учета этих факторов в модель необходимо ввести дополнительные степени свободы ротора - два радиальных перемещения и два угла перекоса оси ротора. Симметрия может нарушаться также вследствие неидеальности опор, а именно волнистости их поверхностей. Поэтому в модели следующего уровня сложности естественно учесть как силовую, так и геометрическую асимметрию. На этом уровне можно рассчитать радиальную и угловую жесткости узла, а также решить полную задачу статики при комбинированном нагружении. На следующем этапе можно рассмотреть задачу динамики узла, причем динамические модели могут иметь различные степени сложности. Так, согласно линейной теории вибрации В.Ф. Журавлева, ротор вращается с постоянной угловой скоростью, а угловая скорость движения шариков по орбите предписана и равна кинематической. При этом уравнения движения деталей узла сводятся к уравнениям движения ротора по пяти переменным (линейным перемещениям центра масс и двум углам перекоса) под действием внешних сил, приложенных к ротору, и сил, обусловленных отклонением формы и размеров рабочих поверхностей (шариков и дорожек качения). Эта модель позволяет рассчитать собственную и вынужденную вибрацию ротора. Однако момент сопротивления вращению остается в этой модели неизвестным, поскольку кинематика шарика частично предписана (известны сОс, w/, а составляющие угловой скорости cjn и (jJj неизвестны). Единственная составляющая момента сопротивления, которая может быть найдена, обусловлена отклонением формы и размеров колец и не зависит от скорости вращения ротора (момент не равен нулю даже тогда, когда ротор не вращается). Этот момент может оказаться источником погрешностей узлов, работающих при малых частотах вращения (чувствительные опоры, стабилизированные платформы). Следующий по сложности уровень моделирования - включение в рассмотрение вращения сепаратора. При этом полагаем, что сепаратор занимает по-прежнему центральное положение, но может вращаться с произвольной угловой скоростью, причем комплект шариков вращается по круговой орбите с такой же скоростью. Если скорость вращения отличается от кинематической, то возникает момент сопротивления, действующий на систему комплект шариков + сепаратор. Этот момент обусловлен проскальзыванием комплекта шариков относительно дорожек качения и линейно зависит от отклонения скорости вращения от кинематического значения. В общем случае учитывают также и момент трения о базу. Эта модель, предложенная В.Ф. Журавлевым для описания режима самосинхронизации движения сепараторов в системе ротор на двух подшипниках, оказалась весьма плодотворной при изучении низкочастотных движений указанного узла. Многие экспериментальные и расчетные исследования свидетельст- вуют о сложном движении сепаратора в шариковом подшипнике. Центральное положение сепаратора неустойчиво, и вследствие этого центр сепаратора совершает определенное движение под действием сил со стороны шариков и базы. Режимы движения могут быть различными в зависимости от режима смазывания в зазоре плавания. Так, если смазывание обильно, то режим движения аналогичен режиму полускоростного вихря в подшипниках скольжения. При этом угловая скорость движения центра сепаратора примерно в 2 раза меньше угловой скорости вращения сепаратора. Для приборных подшипников с одноразовой закладкой смазочного материала этот режим маловероятен. Так, стробоскопические наблюдения, проведенные в Загорском филиале ВНИПП, показали, что центр сепаратора движется по круговой орбите, касаясь базы, причем частота этого движения (в указанном эксперименте около 200 Гц) отличается от частоты вращения сепаратора примерно на 1 Гц. Наиболее полной моделью узла является механическая система твердых локально деформируемых тел с большим числом степеней свободы. Силы взаимодействия отдельных элементов этой системы определяются законами эластогидродинамической теории. Пространственные формы движения не предписываются (или предписываются лишь в самых общих чертах), а получаются в результате решения уравнений движения всей системы как единого целого при заданных внешних воздействиях. В такой модели в принципе возможно учесть все факторы, поддающиеся количественному описанию. Полная система уравнений, скажем, для ротора на двух подшипниках, содержащих по семь шариков, включает более ста дифференциальных уравнений первого порядка, правые части которых являются весьма сложными нелинейными фзшкциями фазовых координат системы. Решают эти уравнения с применением наиболее быстродействующих ЭВМ. При этом получают большой объем информации о ха- рактеристиках узла. Однако для инженерных расчетов такой подход не всегда удобен. В данной книге изложены простые аналитические методики, позволяющие получать как количественные, так и качественные результаты на большом интервале времени работы подшипникового узла. ГЛАВА 2 МЕХАНИКА КОНТАКТА 2.1. ТЕОРИЯ ГЕРЦА Теория Герца рассматривает статический контакт двух тел при следующих предположениях: материалы соприкасающихся тел однородны, изотропны и идеально упруги; область контакта мала по сравнению с радиусами кривизны поверхностей; трение отсутствует. При взаимном перемещении тел контакт можно считать статическим, если относительная скорость невелика по сравнению со скоростью распространения МШ1ЫХ возмущений в телах. В силу второго предположения, при определении перемещений точек поверхности тело можно считать полупространством. Из теории упругости известно, что нормальное перемещение w под действием давления р(х, у), распределенного по области (рис. 2.1), (2.1) me Е - модуль упругости материала; v - коэффициент Пуассона. Для определенности первым полупространством считаем нижнее, а вторым - верхнее. После перехода к полярным координатам г, (р с полюсом в точке (х,у) выражение (2.1) принимает вид (V) w(x,y)=~lf f p(p,)dp, (2.2) <.<P) где ro{\fi) и r(ip) - координаты точек пересечения луча ip = const с границей области (если точка с координатами х, у лежит вне П); и 1)2 - крайние значения i, при которых луч = const пересекает область П. Если точка (х, у) принадлежит П, то ii= О, i/>2 = lir, го{) = 0. Далее рассмотрим именно этот случай. Если в (2.2) взять интеграл по р от О до r(ip) при ip = const, а затем от О до г(<р +7г) вдоль луча то сумма интегралов будет представлять собой площадь S(ip) сечения области под графиком р(х, у) плоскостью, проходящей через линию *р = const. Эту площадь затем надо проинтегрировать по (/) от О до тт. Указанный прием упрощает расчет перемещений по формуле (2.1). Пусть, например, границей области П является эллипс (2.3) где а, b - его большая и малая полуоси, а давление р{,г\) распределено согласно полуэллипсоидальному закону Рис. 2.1 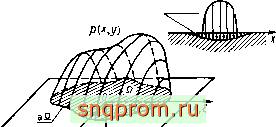 У'1 / Г' р(?,т,) = Ро s/l-aiar-(vlb)\ (2.4) Уравнение границы г = г (</>), когда начало полярной системы помещено в точку (х, у), получаем подстановкой = л: + г cosip, 17 = j +rsin </> в (2.3). В сечении полуэллипсоида плоскостью, проходящей через линию ip = const, получается полуэллипс с горизонтальной полуосью (ri +Г2)/2, где Г1 = г'{<р), ti = г' (ifi + ir). Чтобы найти вертикальную полуось, надо определить середину хорды if) = const эллипса fi. Этой середине соответствует г = Г1 - Гг 1/2. По формуле (2.4) вычисляем значение в точке = X + * sgn (ri -Г2) COS ip,r} = у + sgn (ri -Г2) sin<p. Oho равно длине вертикальной полуоси рассматриваемого полуэллипса, площадь которого 5() = праЬ (д'-х') sinV + (ft) cosip + x>sin2ip После замены tgtp = (6/a)tg ф выражение (2.2) приводим к виду I о тг аЬ- -~~х^ sin ф -cos ф + ху 5т2ф (2.5) I о Перемещение Wj{x, у) поверхности полупространства является квадратичной функцией координат для точек, лежащих внутри fi. Интеграл (2.5) сводится к полным эллиптическим интегралам первого рода К= / [1-(1--)sinv]°d (2.6) и второго рода О И формула для Wj принимает окончательный вид у) = (РоЬ/Ер[К - Dx/a-(K - D)y jР], где к - L (2.7) (2.8) 1 - (Ыа) Вблизи точки контакта О (рис. 2.2) уравнения номинальных поверхностей = j. (к, j) при/= 1,2 могут быть представлены отрезками рядов Тейлора (2.9) где Rj (т = 1;2) - главные радиусы кривизны, измеряемые в плоскостях Oxj zj, Oy/zj главных нормальных сечений тел; т = 1 для оси Oxj, т = 2 для оси Oyj. Если в сечении тела плоскостью получается кривая, обращенная выпуклостью внутрь тела, то радиус кривизны отрицателен; если кривая обращена выпуклостью наружу, то - положителен. Б координатах х, у (см. рис. 2.2), связанных с х/, yj зависимостями Xj = X cosuj - у sinсоу, yj = X sinwy + у COSCOy, зазор Zi + Z2 между поверхностями определяем из выражения (2.10) 2, + Z2 = D г. 11 IS Jl - - ~)sin2coi + ( 1 - 1 ) sm2co2] + + Cxy. (2.11)  Рис. 2.2 Это выражение упрощается, если угол С02 выбрать из условия С = 0: tg2a,2 = a/ -/n)sin2c. Угол С02 € (-7г/4,7г/4], если ( --)cos2co+ 1 1 <о, с*>2 е (т/4, 37г/4] в противном случае. При таком выборе CJ2 большая ось эллипса направлена по оси Ох, а малая - по оси Оу. По углу CJ2 находим угол coi = CJ2 + W и значения Л^. -+ф), (2.13) где л л„ к. Перемещения Wj, вычисляемые по формуле (2.1), стремятся к нулю х' + у^ ->°о, и поэтому можно определить сближение 5 тел как относительное сближение двух достаточно удаленных от зоны контакта точек тел при в направлении Oz. В процессе сближения в некоторой точке (х, у) сначала выбирается зазор, затем возникают упругие перемещения точек по-поверхности. Уравнение контактных перемещений для точек (х, у), принад-лежапдих области контакта, имеет вид 5 = Zi + Z2 + Wi + Wj. (2.14) Вне области контакта, когда сближение недостаточно для возникновения упругих перемещений, выполняется неравенство 5<zi + Z2 + Wi + w. Подстановка в (2.14) выражений (2.8) для Wj и (2.11) для Zi + Z2 приводит к равенству 5-(- (2.15) где Е' = ТЕЕЖ + Ei), которое показывает, что уравнению (2.14) удовлетворяет полуэллипсоидальное распределение давления по эллиптической области контакта. Приравняв свободные члены и коэффициенты при иу в (2.15), получаем формулы для определения а, Ь, ро и 8 по заданным , Rx, Ry и сжимающей нагрузке Р: Е В этих формулах (2.16) (2.17) (2.18) кь = / (1 -); 2-nD(\ + RxiRy) 2-nkaki, 11 и RxRy Rx + Л, a отношение alb = у вычисляем из трансцендентного уравнения (К - D)y (2.19) Значения ка, кь, кр,к^ можно определить из табл. 2.1 (вычисления проведены В.В. Власовым) по заданному значению RxJRy = arcsin е, гдее=>/ьЧЩ^- Прие< 1 значение D = {К - L)le целесообразно вычислять по асимптотической формуле £) = 7г S I: п = 1 (2я - 1)!! ,2 2 и ! 2п - 1 ехр 2(п - 1)1пе При 1 <RxlRy <34 (1 <7< 10) коэффициенты ка, кь, кр, к^, у можно определять приближенно с погрешностью не более 3 %: 1,4664 .,0,0945 1,4184 1,0,0945 1<х -(-) 0,3 1 в . 0,3 1 8 . fcp= 0,2295 уо-в ; fcs = 1,0401 (2.20) 7= 1,0339(--) 0,636 . У Пример 2.1. Вычислить размеры эллипса контакта, максимальное давление и контактное сближение для контакта шарика с внутренним кольцом подшипника 306. Диаметр шарика = 12,303 мм, диаметр по дну желоба = 45,848 мм, радиус желоба г, = 6,34 мм, нагрузка на шарик Р = 1600 Н; материал шариков и колец -сталь ШХ15, модуль упругости Е = 210 ГПа, коэффициент Пуассона v = 0,33; угол контакта равен нулю. Решение. Вследствие симметрии угол ш = 0; первое тело - шарик, второе -кольцо: 11 =Ri2 =5и'/2 = 6,151 мм; R = ~г^; Кг2 =dj2 = 22,924 мм. Средний приведенный радиус кривизны R = 1/(1/6,151+ 1/6,15 1 - 1/6,34 + 1/22,924) = 4,738 мм; Rx = Ru Ru liRn + Л„) = 6,151 . 6,34/(6,34 - 6,151) = 206,3 мм; Ry =RRj{Ra +R) = 6,151 22,924/(6,151 +22,924) = 4,85 мм; Таблица 2.1 | | | | Rx/Ry | | | | | | 1,0000 | 1,0000 | 1.4422 | 1,4422 | 0,2295 | 1,0400 | | 1,0002 | 1,0002 | 1,4424 | 1,4421 | 0,2295 | 1,0400 | | 1,0006 | 1,0009 | 1,4427 | 1,4418 | 0,2295 | 1,0401 | | 1,0014 | 1,0021 | 1,4432 | 1,4413 | 0,2295 | 1,0401 | | 1,0024 | 1,0036 | 1,4440 | 1,4405 | 0,2295 | 1,0400 | | 1,0038 | 1,0057 | 1,4450 | 1,4395 | 0,2295 | 1,0400 | | 1,0055 | 1,0083 | 1,4462 | 1,4383 | 0,2295 | 1,0400 | | 1,0075 | 1,0113 | 1,4477 | 1,4369 | 0,2295 | 1,0400 | | 1,0097 | 1,0148 | 1,4493 | 1,4352 | 0,2295 | 1,0400 | | 1,0124 | 1,0187 | 1,4512 | 1,4333 | 0,2295 | 1,0400 | 10,0 | 1,0154 | 1,0231 | 1,4533 | 1,4313 | 0,2295 | 1,0400 | 11,0 | 1,0187 | 1,0282 | 1,4557 | 1,4290 | 0,2295 | 1,0400 | 12,0 | 1,0224 | 1,0336 | 1,4583 | 1,4264 | 0,2295 | 1,0400 | 13,0 | 1,0263 | 1,0396 | 1,4612 | 1,4237 | 0,2295 | 1,0400 | 14,0 | 1,0306 | 1,0461 | 1,4642 | 1,4208 | 0,2295 | 1,0399 | 15,0 | 1,0352 | 1,0530 | 1,4676 | 1,4176 | 0,2295 | 1,0399 | 16,0 | 1,0405 | 1,0606 | 1,4712 | 1,4142 | 0,2295 | 1,0398 | 17,0 | 1,0460 | 1,0686 | 1,4750 | 1,4106 | 0,2295 | 1,0398 | 18,0 | 1,0515 | 1,0772 | 1,4791 | 1,4067 | 0,2295 | 1,0397 | 19,0 | 1,0576 | 1,0875 | 1,4835 | 1,4027 | 0,2295 | 1,0396 | 20,0 | 1,0641 | 1,0984 | 1,4882 | 1,3984 | 0,2294 | 1,0395 | 21,0 | 1,0712 | 1,1098 | 1,4931 | 1,3939 | 0,2294 | 1,0394 | 22,0 | 1,0787 | 1,1197 | 1,4983 | 1,3892 | 0,2294 | 1,0393 | 23,0 | 1,0897 | 1,1325 | 1,5039 | 1,3843 | 0,2293 | 1,0391 | 24,0 | 1,0947 | 1,1460 | 1,5097 | 1,3792 | 0,2293 | 1,0390 | 25,0 | 1,1033 | 1,1587 | 1,5159 | 1,3738 | 0,2293 | 1,0388 | 26,0 | 1,1123 | 1,1739 | 1,5224 | 1,3683 | 0,2292 | 1,0386 | 27,0 | 1,1223 | 1,1888 | 1,5292 | 1,3625 | 0,2292 | 1,0383 | 28,0 | 1,1325 | 1,2049 | 1,5364 | 1,3565 | 0,2291 | 1,0381 | 29,0 | 1,1441 | 1,2234 | 1,5439 | 1,3503 | 0,2290 | 1,0377 | 30,0 | 1,1547 | 1,2408 | 1,5518 | 1.3439 | 0,2289 | 1,0374 | 31,0 | 1,1668 | 1,2606 | 1,5601 | 1,3373 | 0,2289 | 1,0369 | 32,0 | 1,1792 | 1,2808 | 1,5688 | 1,3304 | 0,2288 | 1,0365 | 33,0 | 1,1924 | 1,3026 | 1,5779 | 1,3234 | 0,2287 | 1,0360 | 34,0 | 1,2062 | 1,3252 | 1,5875 | 1,3161 | 0,2285 | 1,0355 | 35,0 | 1,2207 | 1,3494 | 1,5975 | 1,3086 | 0,2284 | 1,0349 | 36,0 | 1,2360 | 1,3748 | 1,6080 | 1,3090 | 0,2283 | 1,0342 | 37,0 38,0 | 1,2521 | 1,4013 | 1,6190 | 1,2930 | 0,2281 | 1,0335 | 1,2690 | 1,4292 | 1,6304 | 1,2848 | 0,2279 | 1,0327 | 39,0 | 1,2867 | 1,4602 | 1,6425 | 1,2765 | 0,2277 | 1,0318 | 40,0 | 1,3054 | 1,4914 | 1,6551 | 1,2679 | 0,2275 | 1,0309 | 41,0 | 1,3250 | 1,5260 | 1,6683 | 1,2591 | 0,2273 | 1,0298 | 42,0 | 1,3456 | 1,5613 | 1,6822 | 1,2501 | 0,2270 | 1,0287 | 43,0 | 1,3673 | 1,5996 | 1,6967 | 1,2409 | 0,2268 | 1.0275 | 44,0 | 1,3902 | 1,6400 | 1,7120 | 1,2315 | 0,2265 | 1,0261 | 45,0 | 1,4144 | 1,6824 | 1,7279 | 1,2218 | 0,2262 | 1.0247 | 46,0 | 1,4388 | 1,7287 | 1,7447 | 1,2120 | 0,2258 | 1,0230 | 47,0 | 1,4662 | 1,7773 | 1,7623 | 1,2019 | 0,2254 | 1.0213 | 48,0 | 1,4947 | 1,8284 | 1,7807 | 1,1915 | 0,2250 | 1,0195 | 49,0 | 1,5244 | 1,8838 | 1,8002 | 1,1810 | 0,2246 | 1,0174 | 50,0 | 1,5576 | 1,9427 | 1,8206 | 1,1703 | 0,2241 | 1.0152 | 51,0 | 1,5898 | 2,0061 | 1,8421 | 1,1593 | 0,2236 | 1,0129 |
Продолжение табл. 2.1 RxIRy к& 52,0 53,0 54,0 55,0 56,0 57,0 58,0 59,0 60,0 61,0 62,0 63.0 64,0 65.0 65,5 66,0 66,5 67,0 67,5 68.0 68,5 69.0 69.5 70,0 70,5 71,0 71,5 72,0 72,5 73,0 73,5 74,0 74,5 75,0 75,5 76,0 76,5 77,0 77,5 78.0 78,5 79.0 79.5 80,0 80.2 80,4 80,6 80,8 81,0 81,2 81,4 81,6 1,6224 1,6616 1,7013 1,7434 1,7883 1,8361 1,8871 1,9446 2,0000 2.0627 2,1301 2,2074 2,2881 2,3662 2.4114 2,4585 2.5077 2,5592 2,6131 2,6694 2,7286 2,7904 2,8554 2,9237 2,9957 3,0716 3.1515 3.2358 3,3256 3,4201 3.5210 3,6279 3,7419 3.8639 3,9940 4,1339 4,2837 4,4454 4,6206 4,8100 5,0153 5,2413 5,4867 5.7593 5,8754 5,9988 6,1237 6,2554 6,3930 6,5368 6,6853 6,8446 2,0740 2,1463 2,2237 2,3083 2,3986 2.4966 2,6021 2,7177 2.8431 2,9732 3,1287 3,2937 3,4745 3,6744 3,7832 3,8967 4,0170 4,1444 4,2800 4,4226 4,5744 4,7353 4,9072 5,0903 5,2857 5,4942 5.7180 5.9502 6,2166 6,4966 6,7969 7,1225 7,4773 7,8623 8,2835 8,7443 9.2514 9,8108 10,430 11,118 11,886 12,750 13,724 14,830 15,315 15,827 16,370 16,942 17,551 18,224 18,882 19,612 1,8648 1,8887 1,9138 1,9405 1,9687 1,9985 2,0301 2,0636 2,0993 2,1373 2,1778 2,2212 2,2676 2,3174 2.3437 2,3710 2.3993 2,4288 2,4595 2,4914 2,5246 2,5593 2,5955 2,6333 2,6728 2,7141 2,7575 2,8030 2,8507 2,9010 2,9538 3,0096 3,0685 3,1308 3,1969 3,2670 3,3417 3,4213 3,5064 3,5975 3,6953 3.8009 3,9150 4.0387 4,0912 4,1456 4,2020 4,2604 4,3211 4,3855 4,4495 4.5176 1,1481 1.1366 1,1249 1,1130 1,1009 1,0885 1,0758 1,0628 1,0497 1,0362 1,0224 1,0084 0,9940 0,9794 0,9719 0,9644 0,9567 0,9490 0,9412 0,9333 0,9253 0,9172 0,9090 0,9006 0.8922 0,8836 0.8750 0,8662 0.8572 0,8482 0.8389 0,8296 0.8200 0.8103 0,8004 0,7904 0,7801 0,7696 0.7589 0,7480 0,7367 0.7252 0,7134 0.7013 0.6964 0.6914 0,6863 0,6812 0,6760 0,6709 0,6654 0,6599 0,2230 0,2224 0,2218 0,2211 0,2203 0,2195 0,2186 0,2177 0,2167 0.2156 0,2144 0,2132 0,2118 0,2104 0,2096 0,2088 0,2080 0,2072 0,2063 0.2054 0,2044 0,2034 0,2024 0,2013 0,2002 0,1991 0,1979 0.1967 0,1954 0,1941 0,1927 0,1912 0,1898 0,1882 0,1866 0,1849 0,1832 0,1813 0,1794 0,1774 0,1754 0,1732 0.1709 0,1686 0,1676 0,1666 0,1656 0,1645 0,1635 0,1623 0.1613 0,1601 1,0103 1,0075 1.0046 1,0013 0,9978 0,9941 0,9900 0.9856 0,9809 0,9759 0,9704 0,9645 0,9582 0.9514 0.9478 0,9440 0,9402 0,9361 0,9319 0,9275 0,9230 0,9183 0,9134 0,9083 0,9029 0.8974 0,8917 0,8857 0,8795 0,8730 0.8663 0,8593 0,8519 0,8443 0.8363 0,8280 0,8193 0,8101 0,8006 0,7906 0,7802 0,7692 0,7577 0,7456 0,7406 0,735 0,7302 0,7249 0.7194 0.7136 0,7081 0,7023 Продолжение табл. 2.1 81,8 82,0 82,2 82,4 82,6 82,8 83,0 83,2 83,4 83,6 83,8 84,0 84,2 84,4 84,6 84,8 85,0 85,2 85,4 85,6 85,8 86,0 86,2 86,4 86,6 86,8 87,0 87,2 87,4 87,6 87,8 88,0 88,2 88,4 88,6 88,8 89,0 89,1 89,2 89,3 89,4 89,5 89,6 89,7 89,8 89,9 7,0126 7,1859 7,3691 7,5631 7,7634 7,9763 8,2075 8,4423 8,6989 8,9726 9,2584 9,5657 9,8951 10,251 10,624 11,028 11,466 11,945 12,471 13,029 13,642 14,431 15,084 15,940 16,862 17,909 19,909 20,502 22,038 23,844 25,994 28,630 31,846 35,814 40,930 47,749 57,297 63,662 71,623 81,853 90,521 114,59 143,25 190,99 286,53 572,87 20,389 21,218 22,107 23,060 24,082 25,180 26,363 27,645 29,027 30,530 32,166 33,949 35,907 38,049 40,413 43,026 45,933 49,166 52,794 56,876 61,497 66,758 72,799 79,774 87,897 97,457 108,80 122,44 139,05 159,60 185,50 218,82 262,85 322,90 408,18 535,57 739,80 892,17 1100,7 1397,8 1843,4 2560,3 3833,8 6468,7 13578 48727 4,5885 4,6623 4,7395 4,8200 4,9042 4,9923 5,0847 5,1817 5,3835 5,3908 5,5038 5,6231 5,7495 5,8832 6,0254 6,1766 6,3382 6,5107 6,6958 6,8950 7,1099 7,3428 7,5959 7,8724 8,1759 8,5111 8,8831 9,2990 9,7677 10,3010 10,9141 11,6278 12,4715 13,4881 14,7422 16,3353 18,4450 19,7858 21,4012 23,3928 25,9237 29,2341 33,9672 41,1482 53,9176 85,5889 0,6544 0,6489 0.6432 0,6375 0,6316 0,6257 0,6197 0,6135 0,6073 0,6009 0,5944 0,5878 0,5810 0,5741 0,5670 0,5598 0,5524 0,5448 0.5370 0,5290 0,5207 0*5122 0,5034 0,4943 0,4849 0,4751 0,4649 0,4543 0,4431 0,4314 0,4190 0,4058 0,3917 0,3766 0,3602 0,3421 0,3219 0,3108 0,2988 0,2858 0,2715 0,2555 0,2371 0,2154 0,1882 0,1494 0,1590 0,1578 0,1566 0,1554 0,1541 0,1528 0,1515 0,1502 0,1488 0,1474 0,1459 0,1445 0,1429 0,1414 0,1397 0,1381 0,1364 0,1346 0,1328 0,1309 0,1290 0,1270 0,1249 0,1227- 0,1204 0,1181 0,1156 0,1130 0,1103 0,1075 0,1044 0,1012 0,0977 0,0940 0,0899 0,0854 0,0804 0,0776 0,0747 0,0714 0,0678 0,0639 0,0593 0,0539 0,0471 0,0373 0,6963 0,6902 0,6840 0,6775 0,6710 0,6643 0,6574 0,6503 0,6431 0,6357 0,6280 0,6202 0,6121 0,6038 0,5952 0,5864 0,5773 0,5679 0,5582 0,5482 0,5378 0,5271 0,5159 0,5043 0,4922 0,4796 0,4664 0,4526 0,4381 0,4228 0,4067 0,3895 0,3712 0,3515 0,3303 0,3071 0,2814 0.2674 0,2525 0,2364 0,2190 0,1999 0,1785 0,1541 0,1248 0,0863 Отношение радиусов кривизны Ry/Rx = 4,85/206,3 - 0,0235. По табл. 2.1 7 = 11,03; ка = 6,1745; к/, = 0,5599; * = 0,1381; ks = 0,5866. По формулам (2.16) - (2.18) а = 6,1745 зУ 1600-4,738 10-1 - 0,33) 2,1 10 Ь=аН = 1,996/11,03 = 0,181 мм; ,996 мм; I = 0,1381 l/ZJlJh}! = 2.18 ГПа; (1-0,33) 4,738 10- 5 = 0,5866 1600(1-0,33) 4,738 10- 2,1 10 = 12,5 мкм. Пример 2.2. В подшипнике 42726 профилированный ролик катится по кольцу с рысканием на угол 0,02 рад. Найти полуоси эллипса контакта и положение большой оси, максимальное давление и сближение в контакте. Диаметр цилиндрической дорожки качения внутреннего кольца = 158 мм, диаметр ролика = 32 мм, меридиан ролика представляет собой дугу окружности радиусом Л = 20 м; материал ролика и кольца - сталь ШХ15, £ = 210 ГПа, = 0,33; нагрузка на ролик Р = 15 кН. Первое тело - ролик, второе - кольцо, осъОх^ параллельна оси подшипника; Л = 20 м, Л,2 = 16 мм, Л = Л„ = dj2 = 79 мм, cj = 0,02. Р е ш е н и е. Из формулы (2.13) 2 2 - V( = 18 м; х 2 10* 1 -)+ (~L) + 2(- * 2 10 16 79 -)(-?-)cos 0,04] 2 10 2. 10 = 13,3 мм. + () + 2(- 2 10 -)(--i-)cos 0,04] Отношение радиусов кривизны RylRx = 7, 38 10 . По табл. 2.1 у = 80,2; kg = = 23,1699; кь = 0,2874; кр = 0,0718; ftj = 0,2383. Средний приведенный радиус кривизныЯ= 1/] 1/(2-10 ) -ь 1/16 И/79] = 13,3 мм. По формулам (2.16) - (2.18) . - 94 П з/ 15000- 13.3 -10-41-0,33) \, а = 23,17 V- = 21,88 мм; 2,1 - 10 1 [ 2 ] 3 4 5 ... 14
|
|
