Главная страница сайта
Российские промышленные издания (узловые агрегаты)
1 ...
9 10 11 [
12 ]
13 14 Рис. 3.29
на V = 0,3; усилие предварительного осевого натяга F*= 40 Н; отклонения средних диаметров шариков: dj = 1 мкм для / = 1, 2, 3, df == - 1 мкм для/ = 4, .... 7, coi =0,4мкм,/о'/=0 для/ = 2,.... 7.
Решение. Проведем статический расчет.
В первом приближении принимаем бо =0; затем последовательно вычисляем:
1,16 + 1,05 + 3,3655 - 5,37
v = 1,16 + 1,05 -2=0,21 мм;а =-arccos-
0,21
= -11,88°
sma=0,206; /> = 40/(7 - 0,206) =27.74 Н; (2/2 - 1/1,16)- =7,25 мм;
= (2/2 - 1/1,05)=21 мм; /?*5,37 - 1,16(1 - cosa) =5,37 -- 1,16 - 0,0214 =5,35 мм; Л* = 3,3655 + 1,05 0,024 = 3,39 мм; /г ?=ь = (2/2 - 0,9786/3,39) = 1,22 мм; i? = (2/2 + 0,9786/3,39) = 0,776 мм; 2,/К.. -0,168; /г^а ?,2 =0,037.
По табл. 2.1 определяем Л:5 J =0,89; к^ = 0,65. Вычислим кoэффициcнJы
2,1 -10
1--:;rxz- (:
0,91 7,25 - 10-* = 8,88 - 10 Па -м ;
0,91 21-10 = 1,21 10 Па-м ,
1,22 - 10
ч/а
0,776 10-* 27,74
(0,89) 1
(0,65)
.=3,64-10Па-м-; .=(з„.,
Во втором приближении определяем
v=0,21 + 3,87 - 10 * =0,2139 мм; а* = -arccos
у) =3,87 мкм. 0,2055
0,2139
sina*l = 0,2765; Р* =40/(7 - 0,2765) =20,67 Н. Воспользовавшись результатами первого щ)иближения, находим 20,67
= - 16,05°;
б* = (-
г^У/ =3,18 мкм.
3,64 10
Ограничимся двумя щ)иближениями. Далее определяем
/г? =5,37 - 1,16(1 -0,961) =5,32 мм; Л* 3,3655 + 1,05 (1 -0,961) =
= 3,46 мм; /г* = (5,32 + 3,46) /2 = 4,365 мм.
♦
\Вычисляем радиальную жесткость опоры
\ 3/ * , 14-20,67 7(0.961)
К =-Zcos*a* =- =6,3 10 Н/м.
26* 3,18-10
Вычисляем кинематическую угловую скорость сепаратора
12391 3,46
= 4911 рад/с.
2R* 2 - 4,365
Постоянную демпфирования шределим из формулы (3.224) по найденному в эксперименте на вибростенд? относительному уменыиению резонансной часто1ы. Пусть (ojf. - ш )/ш^ = 2,4 %, где - резонансная частооа. Тогда oijojf, =0,95, и по формуле (3.224) Л^/ш, = 0,308.
Собственная Угловая частота радиальных колебаний
о} =yjKj. = л/6,3 - 10У2,59 = 4932 рад/с Значения , Ic, I оцределяем по формуле (3.335) :
111 -0,4/(7 0,961) =0,06 мкм; с, I - [(co (f + 00851,4 +
+ cosl02,8* - cosl54° - 008205° - 008257° - со8308°) + (smO + 8in51.4 +
+ sml02,8° - 8inl54° - sin205* - 8т25Г - suiSOS ) 1 * =0,15 [(1 + 0,62 -
- 0,22 + 0,81 + 0,9 + 0,22 - 0,78) + (0,78 + 0,97 - 0,58 + 0,42 + 0,97 + 0,78) Г = = 0,62 MKM.
Огношжие iCj /Cj I равно 10,3. Правая часть неравенства (3.346) равна
1 - (4911/4932) /[1 - (4911/4932)! +1-1029 0,308 -4911/4932 ** 0,3084911/4932)
Таким образом, неравенство (3.346) - условие существования режима биений - соблюдается.
Для определения частоты биений необходимо знать значение Jul Подшипник смазывается синтетическим маслом ВНИИ НП-7 так, что обеспечивается режим обильного смазывания, а средняя томпература дорожки качения равна 333 К. Масло имеет следующие диаметры при температуре 333 К: =0,017 Па - с; а- = 1,2 10 Па *; 6 =0,0152 К-*; к =3,3 - 10- К-*. Па-*.
ранее, биошй
Используя формулу (3.213) и проводя вычисления, аналогичные проведенным е, для м получаем значение 3,73 - 10 * Н с - м. Поформуле (3.347) период
2 3,14 3,73 - 10-*1(1 -0,991) + (0,308 * 0,996)М10
7,3 - 10[(0,62 - 0,06)* (0,308 - 0,996) - 4 0,62 - 0.06 - (1 -6,28 (8 - 10-* + 0,094) 10*.3,73 Ю *
- 0,991) 1 6,3[0,145 - 0,094 - 4,48 10 1 Частота биений /6=1/7- = 0,04 Гц.
Наибольшая амплитуда радиальных колебаний 6 10 * + 6,2 - 10
= 25 с.
А = -тах
V(l - 0,996) + (0,308 0,996)
= 2,2 мкм.
Наибольшая амшштуда изменения контактного сближения jacosa* =2,2 0,961 =2,1 мкм,
что меньше б* = 3,18 мкм. Наименьшая амплитуда радиальных колебаний 5,6 10
= 1,8 мкм.
V8,l 10 +0,094
Амплитуда биений ЛА = 0,2 мкм. По формуле (3.349) при = 10 * Н * м среднее значение мощности
<А1> =ilii 12391 [10 0>996(6 ♦ Ю- + 6,2 10-*) 4, 365 2[(1 - 0,996) + (0,308 0,996) 1
= 1,37 Вт.
(вреднее значение разности мощностей
<Л^,> - <Л^,> =0,79 3,14 3,73 10 12391/25 =0,46 Вт. Амплитуда колебаний мощности
ДЛ = 0,79 -6,3 10* 0,308 0,996 -6 Ю 6,2 * Ю * 12391/0,094 = 75 мВт. Амплитуда колебаний разности мощностей
AiN -N,) =0,79 -6,3 10(1 -0,996)6 Ю * 6,2 Ю 12391/0,094 = = 2 мВт.
Целесообразно оценить применимость теории, сравнив нагрузку на шарик от предварительного натяга Р* = 20,67 Н с расчетной нагрузкой Pg 0,SM 5/Z = = 0,5 * 2,59 9,8 5/7=9 Н на наиболее нагруженный шарик от веса маховика при его горизонтальном расположении. Центробежная сила, действующая на шарик,
Fц = m,w*/г* = -i-Jг(p?)V(w/г*=-8 7.8 ID 4911 X X 4,36 10 =3,43 Н.
Видно, что Pg и существенно меньше Р*, так что теорией, в которой за основное состояние роторной системы принято состояние предварительного натяга, пользоваться можно.
Нестабильность момента M(t) сопротивления вращению маховика можно рассчитать по формулам (3.348), (3.349), (3.351) для мощности. Момент
м(г)= L.+ [ --.
R* I (ы^- со*) + Aw* 2
+ \CiC2\COS(e -во)]
имеет среднее значение по периоду
<Ж> =
[Мо +
1С, -Цс, I
(to - ы*) -b/iw*
и Амплитуду колебаний (полуразность наибольшего и наименьшего значений)
R*Kipi,o,*
W*) +Л? ?М
kicjl.
Для рассматриваемого узла
<Ж> =
<N>
1,43
= 1,1 10-*Н'м;
П 12 391
= =Л11£1=6 ю-Н'м.
12 391
3.8. ПЛОСКОЕ ДВИЖЕНИЕ СЕПАРАТОРА
В предшествующих подразделах исследование дина;№ки ротора на подшипниках или одного подшипника основывалось на предположении, что движение сепаратора заранее предписано, а именно сепаратор занимает центральное положение и вращается в общем случае с переменной угловой скоростью. Однако во многих случаях необходимьш элементом расчета является определение характера движения самого сепаратора и сил, действующих на него со стороны шариков и базы кольца. Так, ресурс шариковых подшипников газовой турбины летательного аппарата ограничивается износом базы сепаратора. Режим движения сепаратора приборного подшипника определяющим образом влияет на погрешность измерений гироскопа.
До недавнего времени отсутствовали скольчшбудь точные математические модели и надежные теоретические результаты, позволяющие предсказать кинематику и динамику сепаратора. Сложность построения математической модели объясняется несколькими причинами. Во-первых, до сих пор нет полного понимания того, какой режим трения - гидродинамический или граничный (что зависит от количества смазочного материала в подшипнике) - реализуется в конкретном подшипнике в контактах сепаратор - кольцо, шарик - окно сеп^атора. Для ответа на этот вопрос необходимо щ>авильное моделирование процессов миграции смазочного материала в объеме всего подшипника, включая явление срыва капель масла с сепаратора (джог-эффект). Однако эта задача сама по себе достаточно сложна и в настоящее время не решена полностью. Вй-вторых, вследствие наличия конструктивных зазоров на движение сепаратора не наложено жестких связей, что не позволяет даже в общих чертах предписать режим его движения. В-третьих, сепаратор взаимодействует с комплектом нири-ков, движение которых также не задано.
Наиболее полная модель, позволяющая рассчитать движение сепарато-. ра, должна рассматривать динамику всего подшипника. Именно в такой постановке, однако с разной степенью сложности и полноты учета различных факторов, задача решалась некоторыми исследователями (Уолтере, М.И. Курушин, В.М. Петров, П.Г. Русанов). Ими бьши составлены программы расчета на ЭВМ динамики шарикового подшипника. Однако вследствие чрезвычайно малого быстродействия указанных программ их авторам удалось просчитать лишь несколько оборотов вращения ротора, что пракш-чески не дает никакой информации о движении сепаратора, поскольку характерное число оборотов, необходимое для выхода на установившийся режим, составляет 100 или более.
В настоящее время разработана математическая модель и составлена программа расчета динамики ротора на двух радиально-упорных нири-ковых подшипниках. В модели учитьюаются отклонения формы дорожек качения и . шариков, перекосы и неравномерное расположение окон сепаратора, зазор базирования, произвольные внешние силы и моменты, приложенные к ротору, толщины пленок в контактах нириков с кольцами. 226
Для вывода сепаратора на установившийся режим была составлена упрощенная программа расчета дашамики плоского движения сепаратора (по радиальным смещениям центра масс). Указанные программы позволили провести детальное исследование динамики сепаратора в приборном подшипнике 106074 (диаметр шарика 2 мм; Z = 7; частота вращения внутреннего кольца 30 ООО мин ; текстолитовый сепаратор, базируемый относительно наружного кольца; гнезда имеют цилиндрическую форму). Исследовали контактное взаимодействие сепаратора с базой при обильном смазывании, недостаточном смазывании, кулоновском трении (которое при надлежащем подборе коэффициента трения может аппроксимировать режим граничной смазки).
Введем обозначения: Д - радиальный зазор базирования; X - радиальный зазор шарика в окне; 7 - угол поворота сепаратора относительно собственной оси; ~ положения центра сепаратора относительно неподвижной системы, связанной с подшипником (ф^ характеризует орбитальное движение центра масс).
Номинальные значения Д и X для указанного подшипника составляют соответственно 50 10~* м, 75 10 * м.
Основные результаты расчета сводятся к следующему.
При обильном смазывании угловая скорость у сепаратора близка к кинематическому значению, а скорость ф^ орбитального движения центра близка к 0,57 (режим полускоростного вихря ). Данный режим - следствие зависимости силы базирования от скорости качения, которая пропорциональна ~ 7- Поэтому движение происходит таким образом, чтобы указанная шла, а следовательно, иф- 0,5у были малы.
При недостаточном смазывании траектория движения центра масс сепаратора близка к окружности рагруса Д, значение = (ф^ - y)l(2ir) не превышает 10 ... 20 Гц, отличие ф^ от значения cj* (около 200 Гц) не превышает нескольких процентов. Значение равно частоте движения точки касания сепаратора с кольцом по поверхности сепаратора. При Vj = О точка касания неподвижна относительно сепаратора. Описанные режимы движения не согласуются с результатами стробоскопических наблюдений за кинематикой сепаратора данного подшипника. Последнее свидетельствует о том, что в контакте с базой, по-видимому, осуществляется режим граничной смазки. По этой причине более подробно была исследована модель с кулоновским трением.
При кулоновском трении, как показали расчеты, возможны три вида движения сепаратора в зависимости от отношения Х/Д:
при Х/Д < 3 рассчитанные параметры движения сепаратора полностью соответствуют определенным экспериментально; при этом центр сепаратора движется по окружности радиуса Д, т. е. все время касается базы кольца, и значение не превышает 1 Гц;
при 3 < Х/Д 5 сепаратор совершает нерегулярное движение, причем отношение 4Jy может принимать как положительные, так и отрицательные значения;
при \/Д > 5 сепаратор обкатывает базу (кольцо); силы базирования в этом случае значительно возрастают по сравнению с силами при первом виде движения.
Первый режим наиболее благоприятен для гироскопического подшипника; при этом необходимо, чтобы отношение зазора в окне сепаратора к зазору базирования было не слишком велико (для указанного выше подшипника меньше 3). Если зазор в окне велик, у сепаратора появляется возможность катиться по базе (кольцу) практически без столкновений с шариками.
Можно ожидать, что, хотя расчеты проводили для конкретного приборного подшипника, каждый из указанных режимов может реализоваться в произвольном подшипнике.
Аналитический метод расчета параметров движения сепаратора. Изложим аналитический подход к исследованию движения сепаратора при Х/Д < 3, разработанный В.П. Ковалевым.
Пусть сепаратор базируется относительно неподвижного наружного кольца; при этом внутреннее кольцо вращается.
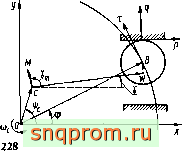
Введем неподвижную правую систему координат Oxyz, ось Oz которой является осью симметрии подшипника. Обозначим (рис. 3.30): С -центр сепаратора; М - центр масс сепаратора; В - центр некоторого шарика; р и q - единичные векторы, направленные вдоль окна сепаратора и перпендикулярно ему; т - единичный вектор, направленный вдоль окружности центров шариков; W - точка, определяемая условиями: СИпроходит через центр окна, вектор WB параллелен q. На рис. 3.30 заштрихованы передняя и задняя стенки окна сепаратора, шарик касается передней стенки. Введем у, , ф^, -у^ - подшрные ущы векторов OV, ОС, Si соответственно. Обозначим й^=СМ; А = ОС; R = OB; d, Д, R* - длины указанных векторов. Пусть е^, е^ - орты, направленные вдоль осей Ох, Оу, Oz. Введем также = - e-sini/z + tyCQ%, ед = e-cosi/z + еу%шф; очевидно, что т = - + ecos. Рассмотрим плоское движение сепа-
ратора, при котором CW лежит в плоскости Оху. Тогда q = - e-siny + + ej,cosy, р = e.cos7 + йу%шг, радиус-вектор точки контакта шарика с окном r;t = R + q(p?/2). Из равенства ОС + СИ + И© = получим
sin(v - Т) = ед sin(i;/g - г) + Л, где ед = Д/Л*; Л = ук*; \ = BW.
(3.352)
Скорость сепаратора в точке контакта с шариком
%=Д + КТ,(Г;-Д)]-
Скорость центра шарика Up = ЫрТ. Рис. 3.30
При движении шарика окна {(Up - и^), q) - или вместе со стенкой
Up=(Uk,q)Kr,q). (3.353)
Пусть О}* - кинематическая угловая скорость центра шарика. Преобразуем выражение (3.353):
о - р =/г. К* - Т - ед (, - Г) ].
где о =Л*со?.
Составляющая вдоль т силы, действующей со стороны колец на шарик, f = /т, / = ft. Со стороны шарика на сепаратор действует сила F = Fq + + kofp, где ко - коэффициент трения шарика в окне. Пренебрегая инерцией шарика, сведем уравнение движения его центра к условию равновесия сил, действующих на шарик в проекции на т : ( (f - F), т) =0 или
F= [(q,r) +/:о(р,г)]. (3-354)
Для определешя силы / воспользуемся формулой (3.163), предположив, что Кх ttjj = Ki Тогда
= 1Кг a R* (со - со*) = к^ {Up - мо),
где к. = IKiat. На шарик же действует сила f = - F. = k.(uo - Up). Использовав формулу (3.354), получим
-. (3.355)
cosCv - т) - sin(v - т)
Рассмотрим только такие движения, когда сепаратор касается базы наружного кольца. Тогда Д - радиальный зазор базирования. Назовем состояние шарика активным или пассивным в зависимости от того, касается или кет он окна сепаратора. В активном состоянии шарик может быть либо ведущим, либо ведомым в зависимости от того, касается он передней или задней стенки окна.
Предположим, что на сепаратор не действуют никакие инерционные силы, кроме центробежной. Тогда уравнения движения его сводятся к уравнениям равновесия
ДР; + Р^+Рг,=0;
. [ i4j - А). F/1 + [dm. Ры1 + = 0.
(3.356) (3.357)
Здесь = (Д + d) miil - центробежная сила; от, - масса сепаратора; Рй = - Р'ъ^А - ъН - <=и действующая со стороны базы на сепаратор; к - коэффициент трения в контакте зтих поверхностей; eMj = = - tMo + Rg [ед,?,] - момент относительно точки С; Мо - постоянная
составляющая момента базирования, обусловленная, например, аэродинамическим трением; - наружный радиус сепаратора.
В формулах (3.356), (3.357) и далее предположено, что все шарики ведущие. Векторное уравнение (3.356) можно представить как два скалярных
(Ff, е^) + (Р^, е^) + (Pj, е^) = 0; (¥j, ед) + (Р„, ед) + (Pj, вд) = 0.
(3.358)
(3.359)
Анализ соотношения (3.352) показывает, что ipj - У/ - малая первого порядка по Сд и Л. Учитывая это, преобразуем уравнения (3.355), (3.357) - (3.359) к виду
[1 - kopVi2R*)] iFj - kKfi, - Mo/R* = 0;
iFf [со5(ф^ -yj) -ко%Щф -yj)] -тЛёт5т(ф^-у„) --kPb=0;
Ъ^Р][%т{ф^-yj) kocos{ф^-yj)] +т,ф1 [А + с1тС05(ф^-у„)] =
= Рь;
Fj = [coj - -у - ед (, - у) со{ф^ - yj) ],
где к' = (Д + R,)IR*; yj = у, + (/ - 1); / = 1, Z.
Решим эту систему при условии отсутствия пассивных шариков. Используя равенства
Jcos(, ,-)y) = Д^81п(-Т^) =0, Z>2; Дсо5 (ф,-.yj)= isiI?ф^-yj) =0,5Z, Z>3; Д sin( - yj) со5(ф^ - yj) = О, Z > 3,
получим уравнения
[1 -kopVi2R*)]k.*icj*-y)Z-kKPb-Mo/R* = 0;
k.eR* (ф^ - у) 0,5Z + m.ld (ф^ r) + = О,
где
P; = -koKeR*(Фc-y)0,5Z + m,Фl{ + dmCos(ф^-Уm)] (3.360)
Будем искать решение, в котором ф^ у (при А/ДО). Так как проскальзывание мало (7 с^), подставим в вьфажение для центробежной силы Фс = <лЗ*. Исключив Pj, получим
(1 -кко)keR*{Фс -7)0,5Z = -m.ccf [кА + d sm(ф^-у„) + + kd cos(фc-Уm)];
[1 - kopVOR*)\k*Ziui* - 7) = - кккок^е^К*(ф^ - y)0,SZ +
+ Mo/R* + ккт,с4 [A + d ,cositl,-ym)] = MIR* * кк[А+ (3361)
-b/:odsm(e-у„) +dmCos(ф^ -? )] w,ajf/(1 -А*о).
Первое уравнение (3.361) представляет собой дифференциальное уравнение отнооттельно ф^ - Ут- Перепишем его в виде [см. уравнение (3.340)]
Фс-Ут = - [l+sin(e-7M+/)].
(3.362)
где Г = 1г(1 - кко)к^1{т^и^к) - период прохождения точки контакта
по сепаратору при = 0; Л = dvl + Л^/(/:Д); / = arctg/:. Пусть^ = О (например, отсутствует дисбаланс). Тогда
2я 2mjuj *
Фс-Ут=-
т (1 -кк,)к:
низ (3.361) следует,что
<4-Ут
+ш,а; Агк'д/(1 - кк,) [1 -Аг р°/(2Л*) 1**2
(3.363)
(3.364)
т. е. центр сепаратора вращается с постоянной угловой скоростью.
Рассмотрим (3.362) при О < А < 1. Интегрированием получим алгебраическое соотношение
которому удовлетворяет искомое решение. После преобразований получим выражение
ф^-у„ = -27Г[1 +лш1(2,гч/г::т -Ц^)Г'.
в котором to и ti связаны соотношением
Г
(to-t,)Vr =
2п
Таким образом, Фс - im периодическая функщм времени с периодом Г/л/! - ; если -* 1, то Г/л/! - А' - < , а амплитуда стремится к нулю.
При Л > 1 уравнение (3.362) допускает два стационарных решения: Фс - Гш +/ +arcsin =0,
*с - Tm + v + т - arcsin = 0.
Второе решение не удовлетворяет условию устойчивости д11 + Аяп{ф^-у„ + ,р')]
arcsut4.
>0.
Теоретически это означает, что небольшое возмущение выводит систему из положения равновесия. На практике такое решение не может реализоваться. Режим, при котором А. > I, предпочтительнее режима при А < 1, так как в первом случае отсутствуют низкочастотные колебания, ведущие вследствие технологических погрешностей изготовления к низкочастотным изменениям момента сопротивления вращению ротора, нестабильность которого в гироскопическом подшипнике приводит к погрешностям измерений всего прибора.
Пример 3.7. Рассчитать параметры движения сепаратора в подшипнике 106074 при следующих данных: 2=7; р? - р' = 1,08 10 м; р1 =5,42 * 10 м; р5 - = 3,399 10 м; р? = 2 Ю' м; Л = 4,95 Ю * м; а„ =30°; Д = 50 м; ffij = 46 10 кг; CJ* = 1200 рад/с; к. = 35 кг/с; Л/ =50 Ю * Н м; внутреннее кольцо вращается; сепаратор базируется относительно неподвижного наружного кольца; около 25 % момента сопротивления вращению, равного 2 10 * Й м, определяется сепаратором с нулевым дисбалансом. Расчет провести для двух значений дисбалансам^ = 0; 20 10 * м. Трением шарика о сепаратор пренебречь (Аг =0)-
Решение. Вычислим Л * = 0,5 (Я * ;
RT-Pl -Р;а -cosaj =5,42 10 -1,08 Ю 0,134 =5,28 10 м; R*~pI +pS (1 -cosoo) =3,399 10 + 1,08 Ю * 0,134 = 3,25 Ю * М; Л* =4,27 Ю-м. По формуле (3.360) находим
Момент, действующий на сепаратор, равен + PlJR- С учетом (3.360) для сепаратора с нулевым дисбалансом
R*{M, +mfARJc)n2R*) =0,25 2 10 Й м.
Из этого соотношения
0,25 2 10 5 4,27 10-/(3,25 Ю ) - 5 10 *
= 4,96.
4,6 Ю- (1200) 5 10-* 4,95 10 Найдем амплитуду А' переменной составляющей момента сопротивления вращению:
а' =mi4fffikRfK2R) * = 4,6 ХО* 1200 4,95 Ю * 4,96 3,25dJ(2 X X 4,27) =0,619d; .
При dff, = О амплитуда а' равна нулю, следовательно, момент софотивления постоянен. Из формулы (3.363) находим
3,14 35-7
ffijcjj 4,6 10-* 1200 4,96
= 2,34 с.
Частота, соответствующая данному периоду, равна 0,43 Гц. По формуле (3.364) находим отклонение от кинематической скорости сепаратора:
5 10 * +4,95 Ю-
= 1,17; *-Ут =
4,27 10
5 10-/(4,27 10) +4,6 Ю- 1200 4,96 1,17 5 Ю *
= 3 Ю * рад/с
35 4,27 10- 7 (соответствуетчастоте4,8 10 * Гц).
cjj - = (cj* - у^) - {Фс-Ут> = 3 10-* +2 3,14/2,34 =2,7 рад/с (соответствует частоте 4,3 Гц).
При dff,=2 10 * м амплитуда колебаний момента Л' = 0,619 2 Ю-* = 1,24 Ю- Н м. Определим А:
2 Ю-* 5 Ю-*
Vl + (4,96)/4,96 =0,4.
Период r/-s/l -А^ функции Фс ~ т Равеи 2,6 с. Как следует из формулы (3.362), разность - ущ зависит от времени, а амплитуда ее относительного изменения равна 0,8.
Конструкция сепаратора, базирующегося относительно шариков.
Обьгшо сепаратор приборного шарикового подшипника базируют относительно одного из колец. Такое базирование имеет определенные недостатки, связанные с повышением момента сопротивления вращению и его нестабильностью. В связи с этим представляет интерес создание сепаратора, базирующегося относительно тел качения. Для устранения возможности касания сепаратора и кольца, как правило, специальным способом профилируют окна сепаратора (например, вьшолнив их коническими). Однако подобные сепараторы трудно изготовить. Кроме того, ограничение движения шарика вдоль оси окна может привести к тепловому заклиниванию.
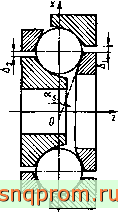
Рис. 3.31
Приведенная на рис. 3.31. конструкция позволяет устранить указанные недостатки. Окно сепаратора имеет цилиндрическую форму, а его ось составляет угол с плоскостью, перпендикулярной Oz. Максимальное радиальное перемещение цштра сепаратора вычисляем по формуле
Рт = Vsinaj.
Для устранения возмажности касания сепаратора с кольцами необходимо обеспечить выполнение условия
min(A Аз ) > X/sina,. (3.365)
Применение указанного сеп^атора позволит снизить момент сопротивления вращению в приборном подшипнике на 20 ... 30 %.
ГЛАВА 4 ДОЛГОВЕЧНОСТЬ ПОДШИПНИКОВЫХ УЗЛОВ
4.1. НАДЕЖНОСТЬ ДЕТАЛЕЙ
Расчет долговечности подшипников по критерию контактной усталости проводят на основе теории разрушения Вейбулла, согласно которой вероятность разрушения элемента сплошной среды пропорциональна объему этого элемента. Впервые зта теория была применена к расчету подшипников качения Лундбергом и Пальмгреном, основные идеи которых использованы в излагаемом ниже методе расчета подшипников на долговечность.
Пусть некоторая частица материала (с элементарным объемом dV) кольца находится в периодическом во времени напряженном состоянии. Такое состояние возникает в любой точке кольца при периодическом прокатывании шарика или ролика над зтой точкой. Во время цикла нагружения, имеющего номер п, в частице dV может возникнуть микротрещина. Вероятность p{n)dV возникновения микротрещины во время /i-ro цикла зависит от напряженного состояния, физико-механических характеристик материала в момент времени, предшествующий разрушению, расположения частицы c?F в кольце.
Величины, характеризующее напряженное состояние, а следовательно, и вероятность возникновения микротрещины в частице dV, имеют два характерных времени изменения.
Медленные изменения происходят в течение. многих (L) оборотов вследствие изменения нагрузки на подшипник, например, при ускорении или криволинейном движении самолета, поезда или автомобиля.
Быстрые изменения происходят от цикла к циклу, как, например, для элемента кольца, вращающегося относительно линии действия приложенной к подшипнику силы. Указанные изменения наблюдаются при динамической неуравновешенности маховика, когда за один оборот вала меняется нагрузка на объем с? F неподвижного кольца. Эта нагрузка так же быстро меняется при вибрации ротора на частотах, близких к частоте его вращения. При этом Q < к <т, где к - номер цикла в обороте; т - число циклов нагружения за один оборот.
Полное число циклов нагружения частицы dV
п= Lm+ к
Вероятность )азрушения единичного объема за один цикл является функцией от А: и Z,:
р(п) =p(k,L).
Пусть в частице dV имеется q элементов и их усталостное разрушение происходит независимо. Тогда вероятность S неразрушения частицы dV равна произведению вероятностей неразрушения элементов:
S = S,S2 ...S = (1 -p,)(l -P2)... (1 ~Pg),
где p.- - вероятаость разрушения /-го элемента (/ = 1, .... q). Поскольку Pj<i, вероятность разрушения частищ ! dV
p = l- S<=> Pi.
/=1
Пусть V* - характерный объем стр)тстурного элемента, полученный некоторым усреднением. Тогда число q элементов в объеме dV равно dV/V*. Введя среднюю вероятность Ро разрушения элемента, получим
P=PoQ=Po
dV V*
Видно, что вероятность разрушения частиЩ)! пропорщ€Ональна ее объему, а Po/V* есть вероятность разрушения единичного объема.
Выразим вероятность безотказной работы кольца в течение Т оборотов через вероятность разрушения частицы за один цикл. Для этого найдем сначала вероятность неразрушения фиксированной частицы в течение одного оборота. Поскольку число циклов нагружения за один оборот равно от, причем от > 1, ар (A:,Z)ot 1, то
[1 -p(l,r)dF] [1 -p(2,L)dV] ... [1 -p(m,L)dV]
1-2 p{k,L)dV>l- ip(k,L)dkdV=l-g(L)dV, k=l 0
где (Z) = / p{k, V)dk - вероятность разрушения частицы в течение о
Z,-ro оборота.
Вероятность неразрушения этой частицы в промежутке [Г, L + dL\ {\-g(L+\)dV\ [\-g{i: + 2)dV\ ... [\ - g(L + dL)dV\
1- 2 g(k)dV 1 -g{L)dLdV . k = L + 1
Эти выражения получены с учетом того, что в течение dL оборотов g(L) меняется незначительно иg(Z)<l.
Шгсть вероятность неразрушения данной частицы за L оборотов есть Д5(Г), тогда вероятность неразрушения этой частицы 3zL + dL оборотов
AS(L+dI>f =AS(L) [1 -g(L)dLdV], откуда
dAS(L)
= -g(L)dVdL.
Проинтегрировав зго выражение от О до Z., получаем
1 Г
In-= [ !g(L)dL]dV. AS(L) о
Для определения вероятности 5 неразрушения всего кольца надо знать произведение вероятностей неразрушения всехМ его элементов
S= ASiASi ... AS.
Тогда вероятность безотказной работы кольца в течение L оборотов определяем из соотношения
In-L = JdF )g(L)dL = [dv] fp(k,L)dkdr, (4.1)
S V 0 кос
где V - объем кольца. Таким образом, определение вероятности безотказной работы кольца в течение L оборотов свелось к вычислению вероятности разрушения частицы в течение одного цикла и интегрированию.
Получим сначала выражение для вероятности разрушения частицы за один цикл. Предположим, что микротрещины зарождаются под действием касательного напряжения г, а предел вьшосливости материала частицы определяется допускаемым касательным напряжением т , причем т, зависит от свойств материала частицы, предыстории ее нагружения, а также является функционалом F{r(Jc, L), т, L) от распределения амплитуды касательных напряжений по числу циклов на всем интервале времени работы кольца. Рассмотрим самый простой расчетный случай: т зависит только от числа п циклов нагружения данной частицы за время работы. Типичная зависимость г, ог п имеет вид
1 - g
г.( )=г2(1+ )~. (4-2)
где Тщ, е, и с - постоянные, причем е, > 1, с > 0.
Эмпирические коэффициенты е. и с, определяемые по результатам испытаний на усталость, характеризуют снижение предела вьшосливости материала вследствие накопления повреждений. При = О напряжение 7-(0) = т%, так что т\ характеризует начальный предел вьшосливости. Поскольку т - медленно меняющаяся функция, рассмотрим ее изменение в зависимости от числа оборотов:
Полагаем, что вероятность разрушения частицы материала за цикл
(4.3)
где т{к, L) - касательное напряжение, возникающее в частице в данном
цикле; F, - характерный объем структурного элемента материала кольца (размер зерна, включения, карбида и т. д.). Таким образом, г,(Z,) - касательное напряжение, при котором в объеме F, за один цикл нагружения вероятность возникновения микротрещины равна единице.
Критерием выхода кольца из строя считаем появление первой микротрещины на поверхности или щелушение поверхности. Однако не каждое разрушение частицы dV приводит к разрушению поверхности, так как далеко не каждая микротрещина, образовавшаяся в материале, до-ходат до поверхности. Вероятность распространения микротрещины от точки с координатой г до поверхности можно учесть введением в правую часть (4.3) эмпирического множителя вида (z,/z) , где - характерный размер структурного элемента вдоль оси Oz, направленной перпендикулярно к поверхности в глубь материала; h - положительная постоянная. При этом фактически получим вероятность такого разрушения частицы, которое приводит к разрушению кольца. Направим оси Ох иОу соответственно вдоль малой и большой осей эллипса контакта шарика с желобом кольца. Зависимость максимального по у значения Тд от z аппроксимируется формулой
Tfl = Го
- ехр (1 - -
где То - максимальное для кольца касательное напряжение, достигаемое на глубине Го.
Зависимость от у nz касательного напряжения, достигаемого при прокатывании шарика по точке (у, z), аппроксимируется формулой
T=T exp
где а - большая полуось эллипса контакта; /- постоянная, определяющая скорость убывания касательного напряжения по оси Oy{f 1).
Приближенная формула для наибольшего касательного напряжения (по всем площадкам, перпендикулярным плоскости Oyz) имеет вид
ехр
Зависимость касательного напряжения то, а следовательно, т{у, z) от X, числа Л' циклов и числа L оборотов устанавливаем исходя из распределения нагрузки между телами качения (шариками или роликами). Окончательно вероятность возникновения микротрещины, приводящей к разрушению поверхности кольца,
pdV =
ехр
Вероятность S неразрушения дорожки качения кольца определяем из следующей формулы:
X (-
Кос
-)dkdL
-ехр
Эта формула распространяется на любое тело при циклическом контактном нагружении.
Исходя из общей фо{ улы (4.4), получим прежде всего вьфажение для вероятности безотказной работы в случае, когда каждый шарик действует на дорожку .качения кольца с одинаковой силой Р = const. Тогда То, Zo и а не эависятот k,L.
После интегрирования покиЬ с учетомLm>\ находим
ехр с
е.(т1)
ехр
zL тп
. z-dsdydz.
где ds - дифференциал длины дорожки качения.
Поскольку То, Zo и а не зависят в данном случае от 7 и г, интегрирование по {-a,d\ HZ& [О, ] дает
= Z4,
Z L m
(4.5)
где AI - безразмерная постоянная, зависящая от с, Л и/; S2 - характерная площадь сечения структурного элемента материала плоскостью, параллельной поверхности дорожки качения; / - длина дорожки качения.
Так как То, Zo и а при постоянной Р не зависят и от s, окончательно получаем
in-JL =
.()(-
(4.6)
5 П. т| :
Поскольку с > о, л > 1, из этой формулы следует, что S увеличивается с ростом и уменьшением z,. Поэтому лучше, если волокна или зерна материала вытянуты в направлениях Ох и Оу п имеют малый характерный размер по Oz. В формулу (4.6) вместо То следует, вообще говоря, вводить напряжения на опасных площадках, ориентация которых зависит от структуры материала.
Если напряженное состояние в объеме V однородно (не зависит от координат), интегрирование формулы (4.1) по объему и по числу циклов с учетом соотношений (4.2) и (4.3) при п>1 приводит к зависимости
1п- =
(4.7)
из которой можно найш т;, проведя испытания образцов. Следует отметить, что в кольце, в отличие от образца, максимальное напряжение возникает не сразу во всех точках, а поочередно, при прокатывании над ними тела качения.
4.2. ДИНАМИЧЕСКАЯ НЕСУЩАЯ СПОСОБНОСТЬ и ДОЛГОВЕЧНОСТЬ ПРИ постоянном НАГРУЖЕНИИ ШАРИКА
Формула (4.6) позволяет определить вероятность неразрушения S кольца, находящегося под действием нагрузки, равномерно распределенной П£ шарикам и постоянной во времени. Число циклов нагружения N =mL. В качестве то могут быть выбраны различные напряжения (максимальное касательное, максимальное растягивающее, октаэдрическое). В излагаемом методе расчета то - максимальное касательное напряжение, возникающее на глубине Zq . Тогда в соответствии с (2.131), (2.129)
То = Tpo,Zo =ib,
где Ро - максимальное контактное давление, определяемое по формуле Герца; b - малая полуось контактного эллипса;
2r(f + 1) (г+ dVITt
а t определяем из уравнения -l)(2t-l) = (b/ay. Согласно (2.17) - (2.19),
1 . РЕ\
(4.8)
где Лд, кг кр + {\-Л)1Е2;
- функции от RJRx (см. табл. 2.1); 2lBf = (1 - v?)/! + Ej VI Vj (/ = 1,2) - модули упругости и коэффициенты Пуассона контактирующих тел; R = Rfiyl (Rx + Ry); Rx Ry - приведенные радиусы кривизны в сеченияхх = const иу = const, определяемые по
формулам = Rlxi2x/(RlX + Rix); Ry = Rly]2yl(Rly +R2y); Rjx
и Rjy (/=1,2)- радиусы кривизны поверхностей в указанных сечениях.
Наряду с табл. 2.1 для вычисления kg, kj, используют приближенные формулы (2.20), из которых следует формула для отношения полуосей
= 1,03()
1 0.6 3 6
С учетом приведенных завишмостей формула (4.6) принимает вид
ЗТР
2яг5,
2паЬт% --JT-
c + h-1
c-h-l c-ft-t-1
где df = l/7T~ диаметр дорожки качения. Из формул для аиЬ следует, что
аЬ ЯкдЦ С учетом тождества
2С+А-2
с-Л + 2
где Dy - диаметр тела качения (шарика или профилированного ролика), и формулы (4.8) для а получим
1--* ,/.-1,с-1;,с./,-1 (-Г-Р .<?в.
2С + А-2
X(-)*d,Dl-(mL)*
и. - размерная постоянная, зависящая от свойств материала, q = (с --Л + 2)/(Зе.)],или
-1п-И.,А-1,с-1с + А-1 X
ED Х()
2С + А-2
Для заданной вероятности безотказной работы динамическая несущая способность дорожки качения определяется как нагрузка Р^, которую дорожка выдерживает (с вероятностью S) в течение = 10* оборотов вращающегося кольца подшипника. В рассматриваемом случае нагрузка на тело качения пропорциональна нагрузке на подшипник. Поэтому при S = 0,9 по Р^ определяем нагрузку Fg на подшипник, выдерживаемую 90 % из партии идентичных колец за расчетный срок службы, в течение которого вал (ротор) совершит 1 млн оборотов, при заданных условиях работы.
Динамическую несущую способность дорожки качения определяем по формуле
1 ...
9 10 11 [
12 ]
13 14
