Главная страница сайта
Российские промышленные издания (узловые агрегаты)
1 ...
8 9 10 [
11 ]
12 13 14 Поскольку момент М обусловлен силами, действующими на сепаратор со стороны шариков и возникающими вследствие трения в контактах шариков с кольцами, можно считать, что М - момент, действующий на систему сепаратор + комплект шариков со стороны колец. Заметим, что v 1р =
При указанных предположениях уравнения движения маховика, сепараторов и шариков имеют вид
Я
... 1 ЭП .. . 1 эп
x+hrX=----; y-hry---;
Mr дх Mr Э.)
эп эп , д..
; = -; M/=--iii- ; Mf =
(3.214)
где - угол поворота сепаратора в п-м подшипнике; Л - момент сил трения, действующих на шарик со стороны колец; дИ/дф) - момент упругих сил, препятствующих качению некруглого шарика.
Координаты центра масс ротора хиу меняются гораздо быстрее, чем угловые скорости сепараторов i, 2 и шариков i / , ф/. Поэтому при опре-
делении X
и из первых двух уравнений (3.214) можно считать, что vl ,Ф1 Ф] cj*,!! Ч'г'* Ф1 1 0. Тогда
Мг(х + hrx) = ~Кг [x + Re S S (c/t; ехр 11(2кф- + ¥?,) + ск/ ехр z-(2fei / -t-vj)]) ] ;
Л^гЬ + гУ)= -Krly + lmi: S (Ск) ехр ((Ткф- + J,)
- -jfc /=1 .1.
+ 4-ехр }Ц2кф]+2)р],
или в комплексной форме
Mr [ - (x + iy) +hr -(х + iy)] +Kr(x + iy) =
= -/C, S I [4 exp /(2A:/ +¥,) +
+ cfc/exp z42feii +v?2)
Решение этого уравнения строится в виде Z I ,
х + г>= 2 2 Hfc/exp J/(2fci / +,/7,)[ +Bkiexp
mtAkj,Bkj - медленно меняющиеся функции.
Подставив этр выражение в (3.215), учитывая мшюсть значений Ак] , Ак) ,Вк/ , Bkj, , ф и при CJ*, ) CJ7* получим выражения
| | | | |
| | | | - (2fctj* + J)+ i(2fc * + J) Л;. |
где CJ;. = VKrlMf. Решение уравнения (3.215) принимает вид
А: /=1 ir - (2кш* + ш*) + 1(2кш* + ш*)Иг
(3.217)
Третье и четвертое уравнения системы (3.214) можно записать так:
pii - со*) = Krlm [(х - iy) 2 I, ск) ехр {г(2А:ф} + Pl)] ] ,
к j=i j
М (Фг- СОс*) = Jm [(х - iy) 2 Б с^/ ехр J /{2кф] 2)\ ]
Подставив (3.217) в эти уравнения, усреднив по интервалу времени, много большему периодов обращения шарика и сепаратора, и учтячто все произведения ехр ii{2kфj ) ехр \-i{2lф', Ргп)} равны нулю при кФ1, получим дифференциальные уравнения
Р (Pi -(t)= Krlm Гб б ck) (Cki ехр \ i [2к(ф- - /) + к 1,1=1
+ - ckiexp i2ik[ф -ф1]\ )(Ak+iBk)\ ; (-l)
Р (}Р2 - CJ = Krlm б б^ Ckj (ск, ехр / [2А: (j -, /)+ ] j +
+ ехр 2/А[4
(Ак + /5fc)
где
(3.215) I i
fc + iBk =
- U>r
Шг ~(2кш*+ш*) - 1{2кш* + ш1)кг
Теперь последние два уравнения системы (3.214) имеют вид X 2 2кск) (Ckitxp \{[2к{ф} н
V (ф/ - oj = Krlra
(3.219)
+ Vl - Vail + Ckl exp ik [ф] {Ak + iBk)
V (ф] - o> *) = KM 2 E 2kcki (Ckl exp i(2k(ф} ~ф]) + L kl=i
+ V2 - Vl) + Ckl ещ, 2ik [ф] - ф]] ) {Ak + iBk)
Третье слагаемое в (3.212) при fe = О обращается в нуль после дифференцирования, а при кФО - после усреднения. То же относится и к последнему слагаемому в (3.212) соответственно при fe + /= OHfe + /=?to.
Решение системы из 2(Z + 1) уравнений (3.218), (3.219) затруднительно. Рассмотрим два простых частных случая.
1. Правый подшипник идеален, в левом имеются два шарика с отклонениями формы - 1-й и /-Й. Тогда в системе (3.218), (3.219) правые части обратятся в нуль во всех уравнениях, кроме уравнений для Vi. А i hi / , в которых правые части завият только от г? = i / - i ,. Почленное вычитание уравнений для ф^-аф] приводит к одному уравнению для г\ = ф i~ ф\-
Zcos
-f xk\Bkidk, -4i) +
osa к I
+ 2Akdkidj, sin [2ferj + cxki - 0*1 + (/ - 1)].
(3.220)
Пусть отлична от нуля только первая гармоника отклонений от сферической формы шарика (шарик овальный) , т. е. fc может принимать значения ±1. Введем обозначения:
di = dii =dii, u?i =dii =d ii, a/ = ai/ = -а-ц;
= ail = -a i}, f = r? + 0,5(a/-ai);
Zv cosa* 4Kr
{d] -di)(Bi
did у (A I A i) sin-(l -I)
Zv cosfle
- didyAi + ,)cos
Г27Г
(/-1)
lit.
Уравнение (3.220) примет вид
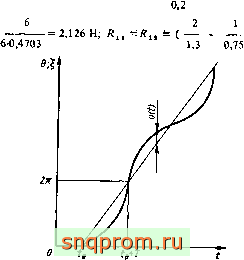
k=qo +iCOs2t + 2sin2 = y/qy + ?2%in2( - to) Его решение не устанавливается со временем при условии
Период колебаний скорости вычисляем по формуле
(3.221)
(3.222)
о Чо + \/ Ях + (?/sin2(t-H t,)
s/ql -Ql ~Я1
График характерной зависимости от f представлен на рис. 3.24.
пример 3.5. Рассмотрим совмещенную опору с подшипниками 106082 (внутренние кольца выполнены на роторе). Параметры подшипника: pJ = pJ = 0,75 мм; Рз = 3,1 мм; р1 = 1,7765 мм; р° = 1,3 мм; Z = 6; материал шариков и колец -сталь ШХ15; частота вращения ротора 310* мин (П = 3141 рад/с; усилие предварительного осевого натяга11= 6 И; масса маховика Mf = 162 г; амплитуды первой гармоники отклонений формы 1-го и 1-го шариков соответственно 2d, = 0,05 мкм, 2d/ = 0,1 мкм. Подшипники смазаны перед началом работы на ресурс смазочным материалом Униол (ТУ 201150 - 73) с базовым маслом МС-20 (ГОСТ 21.743 - 76), загущенным комплексным кальциевым мылом синтетических жирных кислот. Температура дорожек качения равна 323 К. Вязкость м (0,293 К) равна 0,114 Пас, пьезо-коэффициеет р масла МС-20 при той же температуре равен 2,25-10 * Па .
Решение. Проведем статический расчет, применив метод последовательных приближений.
В первом приближении принимаем 5, = О и последовательно вычисляем
1,7765 +0,75 + 0,75 - 3,1 v = 0,75 +0,75 - 1,3 = 0,2 мм; а|= arccos -= 28,05°;
sina = 0,4703; Р =
Рис. 3.24
-) = 4,87 мм;
0,8825
1,3 3,1 -0,75 0,1175
-) = 0,803 мм;
Л„ = ( - -
0,8825
-) = 0,497 мм;
1,3 1,7765 +0,75 0,1175
Л /Л = 0,16; Л /Л„ =0,102.
По табп. 2.1 находимое, = 0,874, fcg, = 0,809. Затем
2,1-10 =-- (
0,91 4,87-10
= 7,42.10 Па-м'; 2Д-10 1
0,803-10
-1/2
) -
(0.874)
ТТГ
-1/2
К =---~ (--
0,91 4,87-10
= 6,74-10Па.м ;
,2/3
0.497-10
(0,809)
-ТТГ -
/0 =fC,42-10) + (6,74-10) М =2,510 Па-м ;
2,126 2/3
5 = (----) = 0,89 мкм.
2.5.10 л
Во втором приближении вычисляем
0.1765
v= 0,2 + 8,9-10 *= 0,20089мм; а|= aiccos--= 28.1°,
0,20089
Отличие значения а, получетного во втором приближении, от начального значения угла контакта мало, поэтому считаем а* = - 28,1°. Далее определяем
Л,* = 3.1 -0,75-0,1175= 3,01мм; Л* = 1.7765 + 0.75-0,1175= 1,86 мм;
R* = 0,5 (3,01 + 1.86) = 2,43 мм.
По формуле (3.14)
1.86-3141
=- = 1202 рад/с,
2-2,43
По формуле (3.17ЭД 3.01-1.86
ш* = 3141-:-= 5566 рад/с.
1.3-2,43
По формуле (3,71) находим радиальную жесткость опоры
3 Р* 1Mb Кг=~- Z ~ cosa*= 1,5.6-- - (0,8825) = 1,625.10 Н/м,
2 5-
0,89.10
Постоянную демпфирования hf можно определить из уравнений (3.214) по результатам измерений собственной частоты радиальных колебаний. Для опоры без отклонений геометрических параметров при напичии внешней гармонической силы первое уравнение (3.214) записываем в виде
.... , , lOJf .
X + hfX + (л1г X =Ае
Установившееся решение этого уравнения имеет вид
i(Ajt А
х = Ве ; В = -
(3.223)
-. О) + iojhf Резонанс соответствует минимуму
ш; - ш' + iuhr\ =ч/ (ш/ -ш') +шЧ
ш = ш* = у/ cjr - 0,5h ,
Таким образом, измерив на вибростенде резонансную частоту ш*, можно определить
или
I *
= V2[l- ( - )].
(3.224)
Пусть относительное уменьшение резонансной частоты ( ш/- - ш*) jui составляет 0,1%. Отсюда ./ ;.= 0.999 и по формуле (3.224) Лг/ г= 0.06. Для определения Яо,Я1,Я2 находим
2со7*- cj*= 9908 рад/с; 2cj7*+ со*= 12 334 рад/с;
cjr = \JKrlMf = 10015 рад/с;
(2со7*- Wc)/wr = 0,99; (27*+ *)/ . = 1,23; -1
А, -f /5, =
1 - 1.23 - I -1,23-0,06
= 1,92-0,28/ ;
1-0,99 +/ -0,99 0,06
= -5,12+ 15,12г .
Значения частот 2 cj*- cj* и очень близки (шариковый резонанс).
Для дальнейшего расчета необходимо определить v [см. формулу (3.213)] . Использовав найденное значение отношения радиусов кривизны R21/R11 = 0,16, по табл. 2.1 находим: ki = 2,85; кы = 0,856. По формулам (3.11) находим
2,126
ai =2,85[ -- 0,91 (
ч 1
-z ) ] = 52,8 мкм;
2,М0
4,87-10
0,803-10
bi = -fll = 15,86 мкм.
Максимальное контактное давление, действующее на наружное кольцо, Р* 2,126-3
Poi =
271в, bJ3 2-3,142-5,28-10 -1,586-10
= 1,21-10 Па.
Толщину слоя смазочного материала рассчитаем по формуле (3.18) По формуле (3.16) найдем скорость качения в контакте
3141. 10-=3,62 м/с.
2 2,43
Тогда при обильном смазывании
Л, =0,803 10- (1,82 - 0,68 0,16) (
2 1 10 X (-tlL-ll-=0,98 мкм.
0,114 3,62 - 2,25 10-, 0,803 10-
1,21 10 0,91
Как Правило, при ресурсном методе смазывания режим обильного смазывания не обеспечивается. Вследствие растекания масла после прохода шарика и последующего частичного возвращения масла на дорожку устанавливается режим недостаточного смазывания. При этом толщина смазочного слоя уменьшается в раз по сравнению с толщиной при обильном смазывании. При коэффициенте р^, равном 3,
Л, =0,33 0,98 =0,32 мкм.
Воспользуемся формулами (3.213) ио1Ч)еделимкоэффИ1щенты лм Коэффициент к, входящий в формулу (3.119), для масла МС-20 равен 1,6 X
X 10-° К-Па-*, теплопроводность масла = 0,13 Вт/(м Ю, б = 0,0298 К^.
Вязкость при нулевом давлении и температуре дорожки 323 К
М(0, 323К) =0,114е~* (Т-Т^) Q.lUe * =0,047 Па с; а =ар--к(Т-Т,) =2,25 10-- 1,6 10-* - 30 = 1,77 10- Па *; (2, =3fp =1,77 10-1,21 10 =21,4. Вычислим Oj, пь формуле (3.125) :
е^ (21,4-1)+1
s, = s(Gi) =2
21,4
= 1,75 10*.
Перейдем к вычислению коэффициента Аг , учитывающего тепловыделение в смазочном слое по формуле (3.129). Считаем, что составляющая угловой скорости на нфужном кольце равна 0,5 I2sina* (см. подразд. 3.5), т. е.
W , - 0,5 3141 0,4703 = 739 рад/с. По формуле (3.125) 5(0,56,) =7516;
Ло, =0,25 739 7516n/(5,28 10)+ (1.58 Ю *)
0,0466 0,13
(0,0298 +
2 1,6 Ю- 1,2 10
,/а
= 18,3;
arsh ln(18,3+Vl + (18,3) ,
ли--::-f il--i I ---1,08
Ao,Vl+A , 18,3V1 + 18,3
По формуле (3.213) находим
0,047 1.75 10
6(2,43 10-)
0,32 10
X 5,28 10-* 1,586 10-* =5,13 Н (1,3 10-)
1,08 10 3.14 X
с м; V = fj.
= 5,13 10
= 6,08 10 * Й'с м.
2 2 6(2,43 10-)
Как видно, тепловые эффекты в смазочной пленке, х^актфизующиеся коэффициентом Аг , приводят к снижению эффективной вязкости на два порядка по сравнению со значением вязкости в изотермических условиях. Однако полученные значения v, /Г дают все же довольно приблизительную оценку реальной эффективной вязкости в контакте, поскольку не учтены эффекты релаксации напряжений. Как показывают более глубокие теоретические исследования, учет сложной реологии смазочного материала в контакте приводит к нелинейной зависимости касательного нащ>яжения от скорости сдвига, щ>ичвм зависимость такова, что нагфяжения не могут превысить значения G - высокочастотного модуля сдвига, характерное значение которого 10 ... 10* Па. При этом коэффициент трения скольжения / = т/р не превышает значения 0,08, характерного для максимального коэффициента трения при эластогидродинамической смазке.
На наружном кольце составляющая угловой скорости принята - 739 рад/с, Скорость проскальзывания на большой оси контактного эллипса равна w Л- Среднее контактное давление, равное 0,75poi. достигается в точке с абсциссой f =
= - 0,75 = 34,5 мкм. Скорость щюскальзывания в этой точке Ды = 739 X
X 3,45 10 = 25,5 мм/с. Расчетное значение эффективной вязкости =
= м(0, T,)as,ktt - 0,047 1,75 10 -1.08 Ю- =8.69 10* Па с. Тогдса-тельное напряжение в указанной точке
эфф^ 8.69 10* 2.5 10-
г= - =---=6.9 10 Па.
0,32 Ю
Полученное непри лемое значение коэффициента трения /=6,9 10/(0,75 X X 1,21 10) = 7,6 указывает на то, что при расчете эффективного значения вязкости Мэфф необходимо учитывать запаздывание возрастания напряжений. Для получения реного значения, коэффициента трения / = 0,076 умножим ди5ф на коэффициент Ю . С учетом этого поправочного коэффициента получим следующие значения м. гк
м =5,13 10- Н с м; V =6,08 10 Н с м. 8-444
Приведенные рассуждения, имеющие оценочный характер, основаны яа знании характного коэффициента трения, который, как оказалось, на два порядка ниже шлучетюго упрощенным распетом. Причина знаяительного расхождения теории и эксперимента связана с запаздыванием роста напряжений в контакте. Но поскопьку оцененное выше характфное касательное ващ>яжеш1е т = 6,9 10 Па, в данном спучае учет сложной реологии 1фивеп бы к тому, что фактическое касательное шифя-женне ушло бы до G 10 ... 10 Па, т. е. примерно на два порядка. Именно так в конце концов и оказалось.
Далее необходимо вычислить значения Чо, Як Чг (см. неравенство (3.222)]. В выражгаие для эпих величии входит общий множитель
1,625 10
= 9,64 Ю с--м^.
Zvcoa* 36 6,08 10-* cos28,1 Далее определяем
<7, = (- 2) 9,64 10 (0.28+15,12) Щ -d\) = (- 2,96) 10 - d ) ; <7. = (-4)9,64 Wdfl.i 1.92 + 5,12)sin (/- 1) =
= 2,71 10 d,rf/an
(/-1)
<г, = (- 4)9,64 Wdjd, ( 1.92 -5,12)cos - (/ - 1) =
= (- 1,23) 10 rf/cos- (/ - 1). Неравенство (3.222) щ1Иводим к виду
2,96tf? - ;)>й,/2,71яп'у (/-1) +1.23cosy (/-l)]
или
d, dl I-2Jf-
I-;---- 1> V0.504 - 0,332cos--(/-1).
(3.225)
Функция cos
(/ - 1)
принимает два значения: 1 при / = 1, 4; - 0,5 при / =
=2, 3,5, 6. В пфвом случае из неравенства (3.225)
dl d.
\> 0,414
следует, что существование неустанавливающихся со временем решений возможно, если значение а„ = max {djdj, dj/d,jiipeBhimaet 1,22. Во втором случае при Id, /dj - dj/d, I > > 0,82 соответствующая нижняя граница в„ равна 1,48. При выбранных-0,025 мкм. df = 0.05 мкм для частоты биений получаем выражение
/б= 4г = -[3080 - 1142cos
(/-1)
- 234s)n
if -
40- =
= - [23,92 -4.54cos тг 3
10 Гц,
(3.226)
откуда /д = 0,0014 Гц (/ = 4) и /д = 0,0016 Гц (/ = 2, 3, 5, 6). Это означает,что при движении ротора будут наблюдаться биения с периодом l/Zg 12 мин.
2. В каждом подшипнике имеется один шарик с отклонением от сферической формы О'-й в левом, /-Й в правом). Тогда в системе (3.218) - - (3.219) нетривиальными будут четыре уравнения для ii, (2. Ф^, Ф' (индексы, указываюшие номера шариков, опушены). Для разностей углов поворотаб' = (1 - (2 игг = -ф^ получаем уравнения
К
* = 77-Т-7 fKt(4) -(4)]
Zcosa* к I. + 14;t44sin(2кп + б' + -а|) J ;
2bfc[(4)-(4)l +
ш'а* к [ + 1444 sin(2r, + б' + ajt -а|)J к.
(3.227)
(3.228)
где = 4f + О- - 1), =4i + (/ - 1) 4 = 4,- , 4 = 4,.
Если ограничиться только первыми гармониками отклонений формы шариков, отбросить индекс А: = ± 1, написать внизу индексы, обозначающие левый (/) и правый (/) подшипники, и ввести переменные в = в' + 2iT (j - r)IZ, = П + (а}/ - ah) 12, то система (3.227) - (3.228) примет вид
/й* = --- i[Bi(d\-di) + 24idid,sin(2 + в)] +
Zcosa* 1.
+ [5 ,(d? -di) -14 ,c/,c?2sin(2S-6)] J ; -5 = I[1 - 4) +2Aidid2 sin(2S + 6) -
(3.229)
Zcosa
- [B-1 (4 - 4) - 2A idid2 sin(2 - в) ]} -. (3.330)
При одновременном обращении в нуль выражений в квадратных скобках система (3.229) - (3.330) имеет решения, соответствующие положениям равновесия.
Условие существования режима биений
d, d.
\>ram 12\
A, A , 1
В рассматриваемом примере меньшим является И 11, что дает критериальные неравенства
> 0,68, max
\ d, d.
> 1,49.
При этом условии система (3.229) - (3.330) - динамическая система на двумерном торе, без положений равновесия. Точного решения (3.229), (3.330), по-видимому, нет, однако из теории таких систем известно, что наиболее типичным случаем является эргодический, при котором любая траектория представляет собой плотную обмотку тора, а решение является почти периодической функцией времени. В частности, эргодичность обеспечивает полное равноправие начальных условий.
Можно, однако, получить приближенное решение системы (3.229 -
- (3.330) при р> V. Действительно, как следует из (3.213), Ixlv = = 4Z(R*/p°). В рассмотренном числовом примере это отношение приблизительно равно 84. Это означает, что в меняется медленнее и в правой части уравнения (3.330) в можно считать постоянным параметром. Тогда (3.330) отличается от (3.221) только тем, что угол 2я(/ - 1)/Z можно заменить произвольным углом в. По формуле, аналогичной (3.226), частота биений
/б=~ [23,92 - 4,54cos20] 10 Гц.
Отсюда максимальная и минимальная частоты биений /б щах = 0,0017 Гц, /бп11п = 0,0014 Гц. Качественно решение системы (3.229) -
- (3.330) выглядит так: переменная в монотонно возрастает или убьшает в соответствии с (3.229), где получено из (3.330) при в = const. В соответствии с формулой (3.217) на колебания с несущей частотой 2cjf-
- w* наложены биения, частота которых плавно меняется в пределах от /gin до /бmax- РИ- 3-25 изображено изменение во времени х-коорди-наты центра ротора; Т^щ и Т'бтах ~ соответственно наименьший и наибольший периоды биений.
Рассмотренная модель радиальных биений маховика, в основе которой лежит шариковый резонанс, дает приемлемые условия существования биений. Частоты биений в примере расчета существенно меньше интересующих конструкторов частот, равных примерно 1 Гц. Однако при учете отклонений геометрических параметров всех шариков возможно увеличение расчетной частоты биений примерно в Z раз. Модель позволила обнаружить в примере нестабильность частоты биений 2 (/ б щах -/бт 1п)/(/бтах + + /бпИп) 0.19. Расчет амплитуды вынужденных колебаний маховика с частотой 2cof - со* дает большое значение, сравнимое с контактным сближением 5* в условиях предварительного натяга, равным 0,89 мкм. Таким образом, более точный расчет требует учета нелинейности формулы Гер-
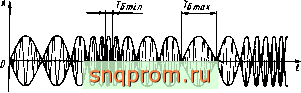
Рис. 3.25
ца для сближения, что может сильно повлиять на результаты. Можно также сделать вьшод, что шариковый резонанс - явление весьма нежелательное и от него следует избавляться, меняя усилие предварительного натяга или диаметр шарика.
Для расчета нестабильности мощности и момента сопротивления вращению маховика необходимо знать скорость проскальзывания шарика в контакте с внутренним кольцом
Р' ,
и/ = -R* (V - W?) + - [Ф/-с^- (fn - со*) cosa*].
В этой формуле л = 1 соответствует левому подшипнику, л = 2 - правому. Сила трения в контакте /-го шарика п-го подшипника с валом при w = 2
и„1 -
где Мэфф ~ эффективная вязкость (3.135) смазочного материала в контакте шарика с внутренним кольцом, которая, как считаем, примерно такая же, как и в контакте шарика с наружным кольцом.
Суммарный момент всех сил трения, действующий со стороны шариков,
М(0 = Ri . Jl- Ы (Vl + V2 - 2co*)Z +
[Д (/-cof) + (\5?-cof)]
(3.331)
Для определенности, аналогично предьщущему, рассмотрим случай 2: пусть в каждом подшипнике имеется по одному шарику с отклонениями формы (/-й в левом, /-й в правом). Тогда в системе (3.218) - (3.219) нетривиальными будут уравнения для <2. , ф' (индексы, указывающие номера шариков, опутцены):
М (V. - со*) = Kflm 2 {Ak + ш0 [4 ехр г [2А:(4/ -
-/)+vi -V2]} +141];
р{:>2 - со*) = К,1т 2 {Ак + iBj,) [4?] ехр \i [2к{ф' -к у.
- Ф') +V2 - Vl]
+ 14Г];
-с07*) =/i:,lm22A:(;t +Ш^) [4 ехр г [2А:(,;/ -
-Ф^) +V1 -V2]} +141];
V ( -cof) =/i:,Im22A:(;t +%) [4c/fcexp /[2А:(,А' -
-Ф') +V2 -Vl]} + I4l]-
Обозначив <pi -ip2 - в'; ~ф^ =ri\ it ~ rgc - argc, получим л * 2R*
M(t) =к, [- -rfi [141 + 141 +
+ 2l4ccos(2A;rj + 0 + a)] .
Таким образом, переменная составляющая момента, обусловленная проскальзываниями в контактах шариков.
M{t) = --J- Bdldf, (- +-) cos(2t4 +
Zcosa* к R* -
(3.332)
Если считать отличной от нуля только первую гармонику отклонений от сферической формы шариков, т. е. положить с?} = , = c?i, с?? = с?, = = с?2, и использовать введенные выше обозначения ? и 9, то
R*K.d,d R* 4
- [5i(-+ )cos(2? + 9) +
+ 5-1 (
.b =
/J.J Rtlrd.d, Zcosa* RtKfd.d, Z cosa*
-)cos(2? -6)] =acosecos2?-bsm9sm2S;
-)];
-)]
в связи с тем, что iT <11ив меняются гораздо медленнее 2, на периоде колебаний 2 можно считать в постоянным параметром. Амплитуда колебаний момента
AM = у/0,5(а' +Ь') +0,5{а' -Ь')cos20 медленно меняется с изменением в от min !я,
до maxjlal, \b Подстановка числовых значений из рассматриваемого примера дает
л , , 10 0,025 0,05 10 1,86 , , , 1,86 A/ , v = кг I =----- 10,28 (-z~rr +
max 2
36(cos28,l°)
2,43
-) -15,12(
1,86
-) =5,76 10- Н м;
0,65 2,43 0,65 min= I = 10 (41,76 - 0,949) =5,50 Н м
Соответствующие максимальное и минимальное значения амплитуды колебаний мощности
<тах) =5 10 3141 = 1.81 мВт; (ДЛ/) П =5,50 10- 3141 =1,73 мВт.
Низкочастотные радиальные биения маховика, связанные с разнораз-MqraocTMO шариков. Негармонические биения простейшего типа возникают в шарикоподшипниковых опорах маховиков вследствие разноразмер-ности шариков. Амплитуда этих биений невелика, но может стать заметной, если частоты вращения сепаратора и собственных радиальных колебаний маховика достаточно близки. Рассмотрим радиальные колебания маховика. Пусть единственньпм отклонением геометрии подшипников является разноразмерность шариков, а угол контакта для подшипников равен а*. Считаем, что вес маховика и центробежная сила малы по сравнению с усилием предварительного натяга и слабо влияют на контактные деформации.
В соответствии с (3.82) потенциальную энергию системы (с тсшостью до несущественных слагаемых, не содержащЕК координат), при т„ = 2 вычисляем по формуле
Zcosa*
Zcosa
Z ,
+ (/-1)1 +
+ dg/cos[<p2 -b-i(.
Zcosa* /=1
dlj sin [ipi +
, V , (3.333)
где dof - амплитуда нулевой гармоники разложения отклонения формы /-го шарика в и-м комплекте; р - угол поворота сеп^атора.
Уравнение радиальных колебаний можно записать в комплексной форме с учетом демпфирования:
(i\ i-hr(x +iy)+c4ix + iy)= i4(Cle + C2e );
Z f 27Г10-1) 1
c = --L- 2 cfS/exp Zcosa* / = 1
Уравнение вращения сепараторов
М Q - со*) = - К^Ъп [ {х - iy) с„ е' ] - Мо,
/1 = 1,2,
(3.334) (3.335)
(3.336)
где Мо < дсо* - момент сил трения сепаратора о направляющий бортик.
При приближенном решении системы (3.334) - (3.336) полагаем, что угловые скорости ip меняются медленно, так что ускорениями можно пренебречь. Решение уравнения (3.334) ищем в виде
где А я В - медленно меняющиеся функщ1и времени, подставляем в (3.334), пренебрегаем А, 6 вследствие их малости, полагаем \р\ ~ (i2
coj и приравниваем коэффищ1енты при е' , е'. В результате
х + /у =
(3.337)
Эта формула описывает смещение ротора при заданных угловых положениях сепараторов. При со* < со, смещение (3.337) мало отличается от статического, получаемого из (3.334), если пренебречь динамическими эффектами (скоростями и ускорениями). Общее решение уравнения (3.334) отличается от (3.337) только общим решением однородного уравнения (3.334), которое является экспоненциально затухающей функцией и не рассматривается, так как интересен только установившийся режим. После подстановки (3.337) в (3.336) получаем уравнения
Vl -со*=-
(3.338)
V2 -СО* =
(3.339)
где Ьп - мнимая часть; черта сверху означает комплексное сопряжение;
б = Vl - V2
Вычитание (3.339) из (3.338) приводит к одному уравнению для медленно меняющейся величины в
в =Яо -?isin(6 -во).
(3.340)
где
71 =-z-
м
бо = argcj - argci.
Для полученного уравнения типа
в =т (3.341)
с тригонометрическим полиномом /(в) следует рассмотреть два существенно различных случ:
1) /(в) = О при 0 = 9/ (/ = 1,2,...). Тогда в (О = б, - решение (3.341) и с учетом (3.338), (3.339) Vi = V2 = const. Таким образом, получаем стационарный режим, устойчивый при/(б/) < О и неустойчивый при /(б/) > > 0. Если все нули простые, то обязательно имеется устойчивый стационарный режим (может быть, не один). В этом режиме сепараторы вращаются с одинаковыми угловыми скоростями и со сдвигом фаз б/. Это и есть режим самосинхронизации сепараторов, впервые рассмотренный В.Ф. Журавлевым и А.А. Лапиньил;
2) /(в) Ф 0. Стационарный режим в этом случае невозможен. Решение уравнения (3.341) в неявной форме имеет вид
в
/ о
= t-to.
(3.342)
где fo - постоянная интегрирования.
Функция в (t) может быть представлена (см. рис. 3.24) как
в{0= {t-to)u{f),
где и (?) - функция с нулевым средним значением и периодом
т= Y .
о /(в)
Действительно, поскольку интеграл в левой части уравнения (3.342) является монотонной и непрерывной функцией верхнего предела и, кроме того, при замене верхнего предела б на б + 2я величина t заменяется на f + 7, то это уравнение можно решИть относительно в : в = ip (t - to), причем.v(f +7 - to) = tp(t - to) + 2ir. С другой стороны, вычтя из обеих частей (3.344) линейную функцию Тв/ (2п), получим
(3.343)
(3.344)
271 271
(3.345)
Функция if (в) является 2я-периодической, поскольку
2я 1 т
Тогда, выражая в из (3.345), получим
-to)\={t-to)u{i),u(t)=-~ W{t-to)).
Но поскольку - 27г-периодическая, а /(г + Г - /о) = vC - о) + + 2я, то м(Г) - Г41ериодическая. Итак, соотношение (3.343) доказано. Проинтегрировав (3.343) по периоду Т изменения t, получим, что u{f) имеет нулевое среднее значение.
Таким образом, один из сепараторов обгоняет другой со средней угловой скоростью lit/T, причем скорость обгона не постоянна, а меняется с периодом Г. Как следует из уравнения (3.337), при различных постоянных угловых скоростях сепараторов ix = <Oci соз = Я>2 возникают низкочастотные гармонические биения маховика. Если же, как при рассматриваемом режиме, разность угловых скоростей сепараторов непостоянна, то амплитуда не является простой гармоникой.
Для уравнения (3.340) случай 2 соответствует неравенству <7о1 > > 111, откуда получаем условие существования режима биений
(3.346)
где ka I > ki I; > w* Период биений находим по формуле
(3.347)
Чтобы найти амплитуду биений, надо подставить vl (О и (г) в (3.337). Из (3.338), (3,339) следует v> (0 = со*/ + (г) при w = 1, 2, где функция (t) такова, что ф„ (t) < со* Тогда из формулы (3.337)
, ехр1/(со*/ + г')Ь,е'* +
где г' = arg(co - со** - гНсо*). Эта функция представляет собой гармонические колебания с угловой частотой со*, модулированные низкочастотными колебаниями, т. е. с св-ибающей
Л(0 = x + z> =
+ 2kiC2COS(0-0o)]*
При этом
тах
min ~
амплитуда огибающей
я(к2 1 -kil).
max niin
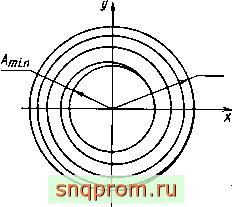
Конец вектора jc + iy задает на плоскости Оху положение оси маховика. На рис. 3.26 изображена характерная траектория оси маховика в течение одной четверти периода биений, на рис. 3.27 - график зависимости смещения jc + z> от времени t.
Для оценки мощности, расходуемой при работе подшипников, полагаем (см. выше), что касательная сила в контакте шарика с кольцом пропорциональна скорости скольжения. Тогда момент сопротивления вращению сепаратора равен Мо +/1( - со*). Из (3.338), (3.339) следует, что суммарная мощность
/г? (
N(t) =Ni (t) +N2 (О = Шо +
с, + с, IV+2 с,с, cos(0 - ©о)
где О. - угловая скорость маховика. При получении этой формулы считали, что силы трения, действующие со стороны колец на шарик, равны между собой. В противном случае возникал бы момент относительно центра шарика, который нечем было бы уравновесить. Разность мощностей, теряемых в правом и левом подшипник ах,опреде ля ем по формуле
N2 (t) -Nx (t) = О. X
+ 0,5ii:;,coJ;.co*
(3.348)
Таким образом.
<Л^ =
<N2>-<Ni >= -
(cj? - CO*) + A?w*
]; (3.349)
(3.350)
Среднее no периоду значение <g> функции g [в (t) ], где 0 (О - решение уравнений (3.341), определяем по формуле
т о т о /(в)
Атах X
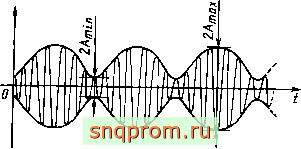
Рис. 3.26
Рис 3.27
Амгаштуды колебаний N vl N2 - N1 (полуразности их максимальных и минимальных значений)
(3.351)
A(N2 -М) ./.c(o.-c.g)(e,c,
R* (w - cj* ) + Aco*
Решив уравнение (3.340), получим вьфажения для cos(a - во), вт(в -- о), входяыщх в формулы для амплитуды огабающей мощности и разности мощностей:
cos(e - во) =-
s/ql - qrsm[2n(t - t,)/Т - р'] Яо + Ql c6s[27r(f - to)/T - р']
si (9 9 )=-°° <- -*
j3 = arctg
<7o + QiCOs[2n it - t) /Т - p]
Ha рис. 3.28, Д, б изображены графики функций
oosx + k
У = -
1 + koosx
1 + kcosx
при различных значениях к = qx/qojk = - 0,5\/3- кривая 1; к = 0- кривая 2; к = 0,5- кривая 3; к = 0,5 V3- кривая 4). На рис. 3.29 изображены характерные графики изменения А (кривая 1), N (кривая 2), Л^, - N2 (кривая 3) во времени. Видно, что при А: =?t о колебания отличаются от гармонических.
Из условия (3.346) следует, что биения возможны, если k,/c, I > 1
Это отношение тем ближе к единице, чем ближе со* к со (резонанс), а также чем больше постоянная демпфирования h. При увеличении cil и С2 I в / раз Г уменьшается в / раз, М увеличивается в / раз, AN, N2 - N\ увеличиваются в f раз. Пусть теперь кг = const, а ci меняется от нуля до критического значения, определяемого из (3.346). При ki О
AA,AN,A(N2 -Nx) 0, <Л^2>-<Л^1>-
2Л*[(ы^ - <.;*)+ A?a;*I
Есж ki I стремится к критическому значению, то Г >, а значения остальных величин стремятся к конечньп пределам. Отметим еще, что период биений пщ)порционален /Г [см. формулу (3.347)] , а ойтальные характеристики от д не зависят.
пример 3.6. Маховик массой Mj, = 2,59 кг вращается на двух радиально-упорных шариковых подшипниках 100609510 с угловой скоростью П = 12 391 рад/с (частота вращения 1,2 * 10* мин^). Подшипник имеет следующие параметры:.;?? = 1,16 мм; р1 = 1,05 мм; рЧ = 5,37 мм; р1 = 3,3655 мм; =2 мм; Z = 7; материал шариков и колец - сталь 111X15, модуль упругости £ = 2,1 * 10* Па, коэффициент Пуассо-
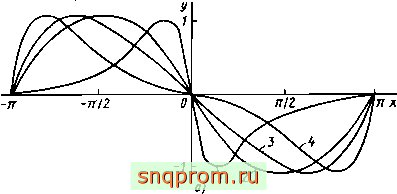
Рис 3.28
1 ...
8 9 10 [
11 ]
12 13 14
