Главная страница сайта
Российские промышленные издания (узловые агрегаты)
1 ...
6 7 8 [
9 ]
10 11 12 ...
18 Постоянные потери вызываются наличием динамической нагрузки, обусловленной неточностью изготовления зубчатых пар и начальным трением в зацеплении. Переменные потери пропорциональны коэффициенту трения в зацеплении, модулю и окружному усилию.
Момент трения на валу насоса (без трения в подшипниках и в уплотнении) определяется по формуле
Mms = T + f,Kp, (96)
где - сила трения при отсутствии нагрузки (Г^ = C61/u(x); С - коэффициент, определяющий степень смазываемости
зубьев (для шестеренных насосов С = 10); и - окружная скорость в м/сек; - условный коэффициент трения в зацеплении (для шлифованных зубьев - 0,08; для нешлифованных зубьев - 0,1);
К - коэффициент, равный ет.
Средние величины к. п. д. зубчатой передачи находятся обычно в пределах 0,97-0,98.
. - 2. РАСЧЕТ НАГРУЗКИ НА РОТОРЫ И ОПОРЫ
К опорам роторов насосов, работающих в системе станочного гидропривода, предъявляются повышенные требования в отношении долговечности работы, которая техническими условиями на насосы станочных гидросистем определяется временем, равным не менее 5000 час.
Опыт эксплуатации насосов показывает, что наибольшему износу подвергаются опоры (подшипники) валов роторов.
Поэтому точный расчет действующих на опоры нагрузок, позволяющий сделать правильный выбор конструкции подшипников и обеспечить требуемую долговечность работы, является необходимым и важным этапом проектирования.
В настоящее время при расчетах пользуются сугубо приближенными зависимостями, занижающими величину нагрузок [9], [31], действующих на роторы и опоры. В последнее время все чаще предпринимаются попытки получения более обоснованных расчетных формул.
В книге Е. М. Юдина [27] анализируются и выводятся зависимости величин действующих усилий, необходимых для расчета опор роторов. Однако эти зависимости выведены в форме, которая затрудняет их практическое применение потому, что она сопряжена с громоздкими вычислениями. Более простые формулы (79) и (80) построены на неправильном предположении линейности характера распределения давления в уплотняющей зоне по периферии роторов.
Исследования [16], [37], [23] характера распределения давлений в радиальном зазоре показывают, что закон изменения давления в зазоре по периферии роторов отличается от линейного
и определяется погрешностями изготовления и сборки деталей нагнетаюшего угла и величинами рабочих давлений.
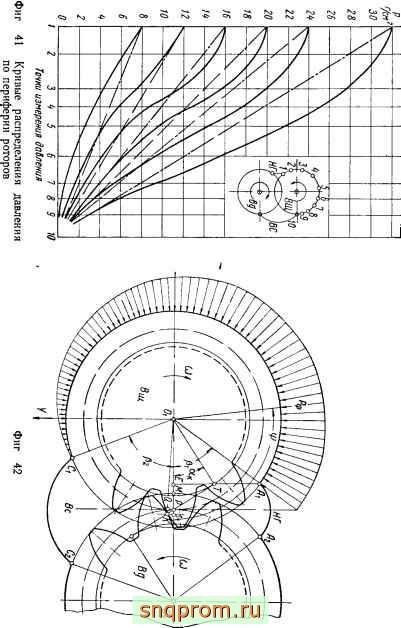
На фиг 41 изображены характерные кривые изменения давления в уплотняющей зоне шестеренного насоса от нуля до номинальной величины (40 кГ/см) Форма кривых меняется от выпуклых (при наибольших давлениях), до вогнутых (при наименьших давлениях) Переход от верхней кривой к нижней совершается постепенно Различие формы кривых определяется изменениями положения роторов в колодце корпуса, которые вызываются действием нагрузки Изменение величины рабочего давления влечет за собой изменение значения равнодействующей гидравлической нагрузки и направления ее действия При этом меняется положение экстремальных периферийных зазоров Все это отражается на форме кривой распределения давлений Обработка кривых распределения давления, соответствующих наибольшим значениям рабочего давления насоса показывает, что без большой погрешности и с запасом надежности закон изменения давления можно считать параболическим Излагаемый ниже расчет нагрузки на опоры роторов шестеренных насосов построен на этом предположении и основывается на наличии эффективной системы канализации жидкости, исключающей возможность возникновения дополнительных распорных нагрузок
При этих условиях величины искомых усилий будут зависеть лишь от значений рабочего давления и геометрических размеров роторов При определении искомых зависимостей будем считать, что действующие на каждый из роторов нагрузки находятся в плоскости зацепления, а за ось ординат примем линии центров 0, Ог (фиг 42)
Результирующее усилие в этом случае будет характеризоваться суммой усилий от действия распределенной гидравлической нагрузки в периферийном зазоре, давлением в зоне нагнетания и усилием от передаваемого крутящего момента
Рассмотрим раздельно участки поверхности ведущего ротора между точками Q и и точками AviK. Точки и Q расположены в конце и начале камер нагнетания и всасывания Характер изменения давления на периферийном зазоре роторов от в точке А^ камеры нагнетания до давления, равного нулю в точке Q камеры всасывания, будем считать, как мы уже условились - параболическим
Текущее значение нагрузки, переменной по величине р^, определяется соотношением
где (фиг 42) - переменное значение полярного угла.
Pi - центральный угол, соответствующий точке А^
(начала камеры нагнетания), Pj, - центральный угол, соответствующий зоне уплотнения, который равен [2я - (Р^ + Рг) ], где Рг - центральный угол, соответствующий точке Су (начала камеры всасывания).
Давление
Элементарная гидравлическая сила dP, действующая на площадку Rgbdip, определяется уравнением:
dP = pRbdri. Ее составляющие по осям координат равны соответственно dPi (х) = PiifRebd cos (я - = - piRgbd cos ij); dPi (J,) = - pRgbdip sin (я - = pifRJyd sin ip.
Интегрируя эти уравнения в пределах изменения угла mi = до 1152 = 2п - Рг. найдем величины (у) и (а;):
Pi lu) =
(Ф - Pi)l sin di =
- pbR, [2 sin p,Py + cos Pi (p2 + 2) - 2 cos p]. (97)
p pbRe
coslj)dlj) -
=-[2cosP2P, + 2sinp, + sinp,(p2 + 2)]. . (98)
При Pi = Рг = P формулы (97) и (98) значительно упрощаются: P. ,.л = nhP! Tecs p + Г99
и
Pi(.,=p6/?.[p+p-s.np(p ;4)-.
(99) (100)
Участок криволинейной наружной поверхности ведущего ротора, расположенный в зоне нагнетания (от точки до точки /С, фиг. 42) удобно рассматривать раздельно - выше и ниже линии центров Oi, О2. Оба участка подвергаются действию полного рабочего давления р, поэтому усилия, возникающие здесь определяются, как произведения величин давления на проекции соответствующих криволинейных участков. При этом часть поверхности ротора, находящегося справа от вертикальной плоскости, проходящей через точку контактирования К (на фиг. 42 линия SK), при нахождении составляющих P(j,) не должна приниматься в расчет потому, что силы, действующие на эту поверхность вверх и вниз от горизонтальной оси, взаимно уравновешиваются. Для участков поверхности ротора, расположенных справа от вертикальной плоскости, проходящей через точку Р (полюс зацепления), величины составляющих сил давления, не учтенных предыдущими формулами, являются функциями угла поворота роторов. 94 , - . , .
Следовательно, для участка поверхности ведущего ротора, расположенного выше оси координат О^Х, постоянные составляющие усилий определятся из уравнений
, Р2iy)ещ==рЬ (РЕ) =pb(-R, cos fi,); (101)
Р2 w ещ = -рЬ (Л i£) = - pbRg sm pi, (102)
a переменные составляющие - из уравнений:
Рз(у)ещ = pb {PS) = pbriff -iga J sma=
= р6-2!(ф -tgaK)smacosa; (103)
Рз = ~pb{PQ) pbr (Ф - tga) cos =
=-pb4(9-tgaJcosa . ч (104)
Величина полезного момента сопротивления на ведомом роторе определяется суммированием составляющих моментов М- и М2 относительно оси этого ротора и Mg относительно полюса зацепления. Каждый из составляющих моментов является результатом действия на соответствующем плече сил, приложенных к участкам поверхности ротора, проектирующих на оси координат в виде отрезков РМ, PS и PQ.
Величины составляющих моментов ведомого ротора находятся из следующих уравнений-
М
где
PM=/z = i?,-A- = A.(--l).
Тогда
* лл 1. к f COS Ok л ,
M, = -pb-{-s--1); J
, M, = pb{PS){--);
после подстановки значения PS
1
M = pb~{sina cos(tp - tgaJ - smcos(ф - tgaJJ; M, = -pb{PQ); после подстановки значения PQ
Mg = - Y pb cos* (ф - tg a) (отрицательный момент).
, ч 95
(Суммируя найденные величины моментов, получим следующее уравнение
а1 <. .г,
{ [S - 1 ]+ 2 sin а, cos а л Ф - IgaJ - cos а, (ф - tga JJ . (105)
cos2 ае
Это уравнение можно преобразовать в известную нам формулу:
Составляющие усилия, определяемого действием Мдд, находятся из следующих уравнений: . .
cos ак cos ас
2М
(г/) ещ -
1) + 2sin а, cos а, (ф -Iga) - cos а, (ф - Iga J] ; (106)
2sin2a (Ф -lgaj +
4 (x) ещ - l& к - 2 ~2~
(107)
При суммировании отдельных слагаемых для ведущего и ведомого роторов следует иметь в виду, что значения Рг{у)вд и Рцу)вд в отличие от аналогичных составляющих на ведущем роторе являются отрицательными. Горизонтальные составляющие усилий равны между собой, но действуют в противоположных направлениях, поэтому в дальнейшем величины суммарной горизонтальной составляющей приводятся лишь для ведущей шестерни.
Чтобы представить все составляющие усилий в функции радиуса окружности головок шестерен Rg, воспользуемся следующей зависимостью:
cos Og
где
Тогда
cos Ug
COS Ok
-sinpi-4-a[(-l)tga,-f-+ 2 (ф - Iga) - (Ф - Igaf sin cos a
Если обозначить через Q величину
cos + -г^- [2 sin + sin р, (р2 + 2)] - sin р
\>ип
которая характеризует конфигурацию камер нагнетания и всасывания, то уравнение (108) приобретает следующий вид:
2 т = Р^е\с,~\а\[- - 1) tga, + + 2 (Ф - tg а J - (ф - tg а^) sin cos
Суммарная величина вертикальных составляющих определяется из следующего уравнения:
2 Р^у) ещ = bbRg I р?- sin р2 + [cos Pi (Р2 + 2) - 2 cos р, -
, - (cos р, а) -1- 1) -f- cos а, (ф - tg а,)] } . Значение суммарной величины усилия для ведомого ротора
2 ва = pbRe {-р^ sin Р2 + ~ [cos Р, (Р2 2) - 2 cos р,] -
. -(cosp,-a) + [(-l)-cos2aЛф-tgaJ2] . (109) Если обозначить в последних формулах через С2 величину I, Р2 + И Pi (Р^п + 2) - 2 - Н ~ ( Pi -
то они приобретут следующий вид:
2 Р,у) SS = pbRe [с, -f -(- - l) - cosa, (ф - tga,)] ; (110)
Р(у)ещ = pbRe[C2-[- - \) + cosaA-\.ga,f\. (Ill)
Общий вид уравнений (ПО) и (111) свидетельствует о параболическом характере изменения величин суммарных составляющих усилий на роторах. Можно заметить, что при ф = tg а^, когда точки контакта зацепляющихся зубьев находятся в полюсе зацепления, функции 2Р(у)вщ и Р(у)вд достигают своих экстремальных значений:
Р(У) ещ. наим--PbRe - у ( - l)
2 Р(у)ед. наиб = pbRg Cg + - - 1
7 Рыбкин и Усов 88
(112) (ИЗ)
Для этого же угла поворота величины функций Sweu; й Sw ез равны между собой. Следовательно,
Х^М^-ч =V.)ea =pbR/c,-ai--\)igaA. (114)
При эффективной системе канализации жидкости (что предполагается настоящим расчетом) отсеченное междузубовое пространство с момента вступления в зацепление новой пары зубьев до момента симметричного расположения точек контактирования на линии зацепления соединяется с камерой нагнетания, а в дальнейшем, вплоть до выхода из зацепления предыдущей пары зубьев, с камерой всасывания. Поэтому действие каждой пары зацепляющихся зубьев должно рассматриваться в пределах угла поворота ведущего ротора
от Ф1 = tg - до Ф2 = tg а„ + .
При изменении угла поворота в этом интервале функции ещ
и Swea не достигают своих экстремальных значений, которым
соответствует значение аргумента ф = tga --?-.
sin Ct COS Ctfc
Подставляя значения ф^ и фг в уравнения для 2 Р{х) вщ - 2 а, ЦР(у)вщ и 2(4) ей, определим величины суммарных составляющих усилий на ведущем и ведомом роторах в начальный (1) и конечный (2) моменты:
Р1У)ещ1,2 = рЬе [2 - ( 1) +- cos 2 PW) еЗ 2 = PbRe[C2 + (i О f cos
При ф1 = tga --:
2 Рм ещ ез, = pbRg [c,~{--\)iga,+ a +
, а я2
-f-g-sinacosa
При ф2 = tg + :
(115) (116)
(117)
(jr) вщ
e6, = pbRg [Ci--(- l)lga,--a + -f-ysinacosa-
(118)
Среднее значение составляющих усилий на роторах может быть найдено, пользуясь формулой:
. . , Р{х. у) вщ ед (ср) = \ 2 t-- ) i Р^-
Подставив в 5ту формулу зйачения соответствующих составляющих усилий, получим:
Pw)euiicp) = pbRg С2 -Y (- - 1) + -cos K ; Р(х)ещ edicp) = pbRgC~(-- l)tga + -sinacosa
(119) (120) (121)
Пользуясь найденными средними значениями составляющих усилий, можно определить среднее значение угла наклона 6 к осям координат результирующего усилия из следующих соотношений
Р(х)вщ (ср)
Р(х)вд (ср)
Значение самого результирующего усилия определяется по известной формуле
Ррез = У^Ь) + Р(у)-
Наибольшие величины результирующего усилия, подсчитанные для насосов с числами зубьев роторов 12 и 18 (при коэффициенте
исправления 5 = 0,5 и при Pi = Ра = ) составляют:
для ведущей шестерни рреэ (вщ)= (0,75 0,8) pbR/, для ведомой шестерни ррез (вд) = (0,85 - 0,9) pbR. В качестве практической расчетной зависимости применяется
P = K ,pbR
где . -
= (0,85-=-0,9)
Анализ функций, полученных в настоящем разделе свидетельствует о том, что величина результирующего усилия, действую-Щ,его на роторы, а следовательно, и опоры, находится в прямой зависимости (при прочих одинаковых условиях) от размеров камер нагнетания и всасывания (углы Pi и Рг). Кроме того, суммирование составляющих усилий показывает, что абсолютное значение результирующего усилия на ведомой шестерене больше усилия, действующего на ведущую шестерню.
Для снижения величины усилий предпринимаются различные конструктивные меры. В некоторых конструкциях камера нагнетания насоса выполняется в виде узкой щели, а камера всасывания расширяется до линии центров роторов и даже выше (фиг. 49, 51). 7* 99
Применяются также конструкции насосов, в которых для выравнивания усилий, действующих на шестерни, камеры нагнетания и вса-

а) 6) I
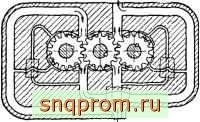
Фиг 43. Принцип гидравлической разгрузки опор:
о - у двухроториого насоса, б - у тречроториого насоса
сывания располагаются несимметрично по отношению к роторам (фиг. 47). На долю ведомой шестерни в этом случае приходится меньший участок камеры нагнетания.
В конструкциях некоторых насосов для разгрузки опор применяется гидравлическая балансировка по принципу, показанному на фиг. 43.
, 3. ВАЛЫ (ОСИ)
. Конструирование и расчет
В зависимости от конструкции насосов определяется конструктивная форма приводного и ведомого валов. Валы насосов изготовляются двухопорными, консольными, гладкими и ступенчатыми, со шпоночными канавками или шлицами для передачи вращения, сплошными или пустотелыми. Применяются также конструкции насосов с безопорными валами - торсионами (см. фиг. 87), служащими лишь для передачи крутящего момента. Вся нагрузка воспринимается в этом случае опорами ротора рессоры. В тех случаях, когда предусматривается привод к насосу через ременную или зубчатую передачи, торсионный вал снабжается дополнительной опорой, воспринимающей усилие от передачи привода (фиг. 86)
Иногда ведущие валы выполняются с выводом приводных концов по обе стороны насоса ( Plessey Keelavite ).
Конструктивный вариант вала, его функции в насосе (ведомый или ведущий) и тип опор (качения или скольжения) определяют его геометрию и комплекс расчетных и технологических требований, которые необходимо учитывать при конструировании.
Методика расчета валов насосов на прочность не отличается от методики расчетов обычных валов по известным формулам, применяемым при расчетах деталей машин.
В случаях тяжело нагруженных валов роторов насоса расчеты должны включать:
1 ...
6 7 8 [
9 ]
10 11 12 ...
18
